Your shopping cart is empty!
 English
EnglishMS7025 V3 Servo Motor & Open protocol RS485 Driver 4A 15bit 1.30Nm 540g 4KV with hollow encoder magnet for slip ring

Price: $117.80
Ex Tax: $117.80
Ex Tax: $117.80
3 or more $116.15
6 or more $114.50
10 or more $113.08
6 or more $114.50
10 or more $113.08
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
257702531 MS7025 V3 Servo Motor & RS485 Driver 4A 15bit 1.30Nm 540g 4KV with hollow encoder magnet for slip ring
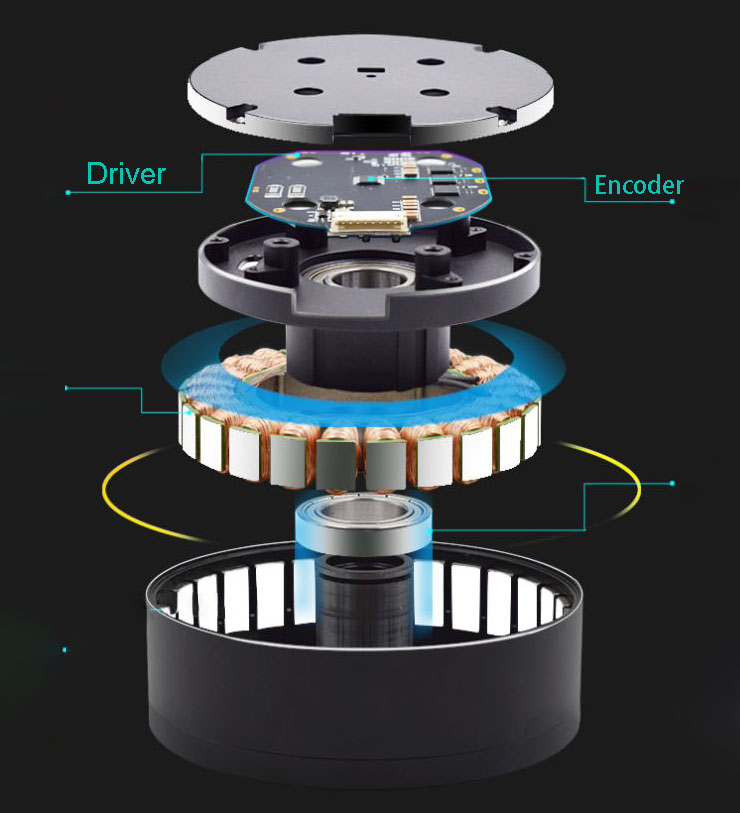
MS series gimbal motor is including the motor, encoder and driver. You can use the slip ring. The driver is with open RS485 or CAN protocol. You can design your own controller to control the motor, such as Arduino, or send command through PC.
MS V3 Improvements:
- The main frequency of MCU is increased from 48MHz to 108MHz, the control loop becomes more stable.
- Control algorithm upgrade, low speed performance improvement。
- 15bit encoder with hollow encoder magent, it support slip ring.
- Support upgrade the firmware. The current version is V2.35.
- Support RS485 and CAN version.

Driver Specifications:
Power: 6V - 24V
Driving current: 2.0A
Max Driving current: 3A ( 5S )
MCU: M0 (108 MHz)
RS485 BaudRate: 9600 19200 38400 57600 115200(default) 230400 460800 1Mbps 2Mbps
PWM: 32KHz
Torque closed loop control: Support 32KHz
Speed closed loop control: Support 4KHz
Position closed loop control: Support 2KHz
Firmware: Support updating online
There is a molex 1.25mm 3pin plug for USB to UART, to set and test the motor with PC program.
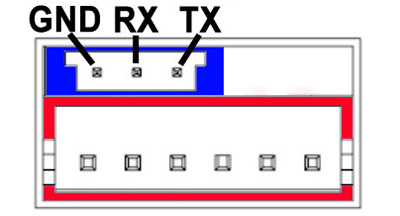 40 50 connector
40 50 connector 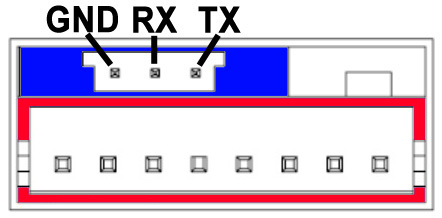 70 90 120connector
70 90 120connector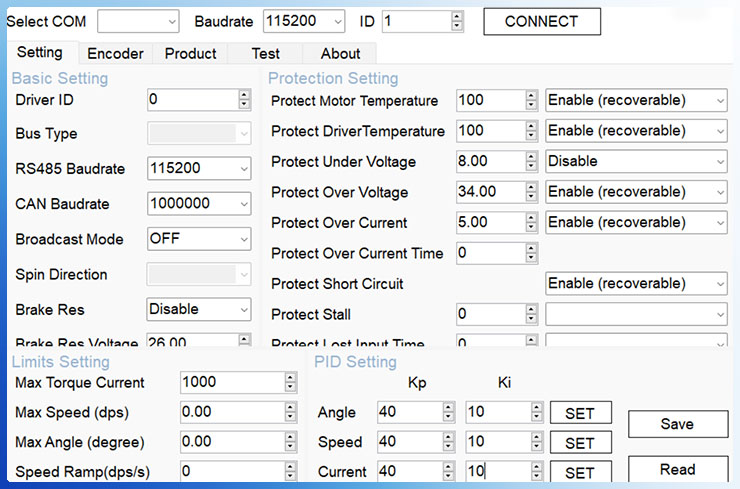
Motor Specifications:
| MS series motor V3 | ||||||||||||||||
| 3008 | 3506 | 4005 | 4010 | 4015 | 5005 | 5010 | 5015 | 7010 | 7015 | 7025 | 9010 | 9015 | 9025 | 12025 | ||
| Nominal voltage | V | 12 | 12 | 12 | 12 | 16 | 16 | 16 | 16 | 24 | 24 | 24 | 24 | 24 | 24 | 24 |
| Nominal current | A | 0.64 | 0.79 | 0.79 | 0.53 | 0.86 | 0.8 | 0.82 | 0.69 | 0.7 | 1.2 | 1.29 | 1.85 | 1.72 | 1.78 | 1.5 |
| Nominal torque | Nm | 0.04 | 0.05 | 0.08 | 0.13 | 0.25 | 0.18 | 0.25 | 0.32 | 0.6 | 0.8 | 1.3 | 1.0 | 1.55 | 2.5 | 3.5 |
| Nominal Speed | rpm | 1160 | 1250 | 450 | 363 | 160 | 500 | 150 | 80 | 150 | 80 | 50 | 160 | 100 | 60 | 40 |
| Max Speed | rpm | 2000 | 2100 | 1092 | 550 | 656 | 985 | 505 | 340 | 240 | 144 | 96 | 384 | 260 | 144 | 96 |
| Stall torque | Nm | 0.09 | 0.13 | 0.11 | 0.16 | 0.35 | 0.28 | 0.37 | 0.42 | 1.4 | 1.6 | 1.8 | 2.2 | 3.4 | 3.4 | 5.0 |
| Stall current | A | 1.6 | 2.3 | 1.2 | 0.8 | 1.2 | 0.7 | 1.2 | 0.9 | 1.8 | 2.4 | 3.4 | 1.4 | 2.7 | 6.2 | 8.1 |
| Phase to phase resistance | Ω | 6 | 4.5 | 8 | 12 | 9.8 | 6.6 | 10.8 | 13.5 | 5.9 | 7.5 | 10.5 | 8.2 | 5.8 | 9.0 | 10.5 |
| Phase to phase inductance | mH | 1.68 | 1.47 | 2.35 | 3.95 | 3.08 | 2.83 | 4.74 | 6.56 | 13 | 16.7 | 19.8 | 30 | 33 | 35 | 5 |
| Speed constant | rpm/v | 167 | 175 | 91 | 46 | 41 | 66 | 33 | 23 | 10 | 6 | 4 | 16 | 11 | 6 | 4 |
| Torque constant | Nm/A | 0.06 | 0.06 | 0.10 | 0.2 | 0.23 | 0.29 | 0.27 | 0.47 | 0.46 | 0.67 | 1.01 | 0.54 | 0.9 | 1.4 | 2.33 |
| Rotor inertia | gc㎡< | 35 | 58 | 56 | 81 | 105 | 136 | 192 | 268 | 748 | 933 | 1040 | 2860 | 3100 | 4656 | 5500 |
| Pole pairs | 7 | 7 | 13 | 13 | 13 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 21 | |
| Motor weight | g | 49 | 63 | 65 | 92 | 120 | 92 | 135 | 174 | 255 | 360 | 540 | 510 | 650 | 880 | 1145 |
| Size Diameter | mm | 30 | 35 | 39.6 | 39.6 | 39.6 | 49 | 49 | 49 | 69 | 69 | 69 | 89 | 89 | 89 | 120 |
| Size Length | mm | 25 | 26 | 23 | 28 | 33 | 23.9 | 28.9 | 33.9 | 28.9 | 33.9 | 43.9 | 37 | 42 | 53 | 46 |
| Connector | ||||||||||||||||
| Driver Input Voltage | V | 6-24 | 6-24 | 8-30 | ||||||||||||
| Driver Current Norminate | A | 2 | 2 | 4 | ||||||||||||
| Driver Current Burst | A | 3 | 3 | 7 | ||||||||||||
| RS485 BaudRate | 9600 19200 38400 57600 115200(default) 230400 460800 1Mbps 2Mbps | |||||||||||||||
| CAN BaudRate | 1Mbps | |||||||||||||||
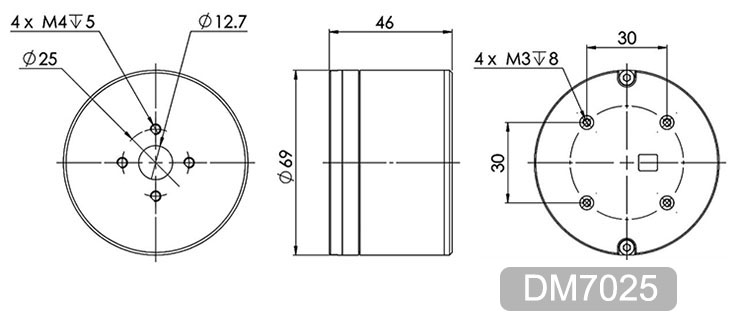
Drawings
Exploded diagram
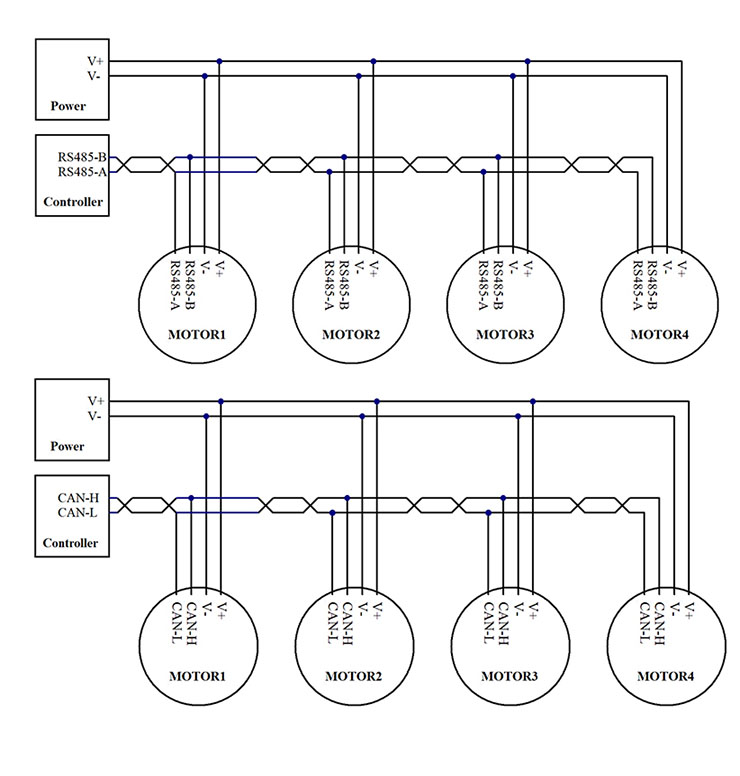
RS485 bus and CAN bus connection.
Comparion list of MS series motors.
| Name | RMD-S | MS V2 | MS V3 | ||
| Encoder (bit) | 12 | 18 | 12 | 15 | 15 |
| Precision (0) | 0.18 | 0.005 | 0.18 | 0.022 | 0.022 |
| Encoder magnet | hollow | solid | hollow | hollow | hollow |
| Slip ring supportable | Yes | No | Yes | Yes | Yes |
| Firmware upgrade | No | No | Yes | Yes | Yes |
| MCU | M0 (48MHz) | M0 (48MHz) | M0 (64MHz) | M0 (64MHz) | M0 (108MHz) |
| PWM Frequency | 24kHz | 24kHz | 32kHz | 32kHz | 32kHz |
| Communication | RS485 CAN | RS485 CAN | RS485 | RS485 | RS485 CAN |
| Baudrate (RS485) | 9600 19200 38400 57600 115200(default) 230400 460800 1Mbps 2Mbps | ||||
| Baudrate (CAN) | 1Mbps | No | No | 1Mbps | |
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power