Your shopping cart is empty!
 English
EnglishMOP4011-50 DC brushless servo motor set of high precision, small backgap and high torque harmonic deceleration motor with RS485 driver 4.2Nm

Product Code: 25840111
Availability: 50000
Availability: 50000
Price: $498.90
Ex Tax: $498.90
Ex Tax: $498.90
3 or more $491.50
8 or more $484.90
8 or more $484.90
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
25840110 MOP4011-50 V2 Robot dog Motor with harmonic decelearation with RS485 Driver, Stator 4011 4.2Nm

Specifications:
| Turns | 27 | |
| Nominal voltage | V | 12 |
| Nominal current | A | 1.43 |
| Nominal torque | N.M | 4.2 |
| Nominal Speed | rpm | 12 |
| Max Speed | rpm | 23 |
| Stall torque | N.M | 6.6 |
| Resistance | Ω | 3 |
| Wire connect | Y | |
| Phase to phase inductance | mH | 1 |
| Speed constant | rpm/v | 47 |
| Torque constant | N.M/A | 0.1 |
| Rotor inertia | gc㎡ | 81 |
| Gear ratio | 50:1 | |
| Backlash | <20 | |
| Driver No. | DF40 | |
| Input voltage | V | 7.4-32 |
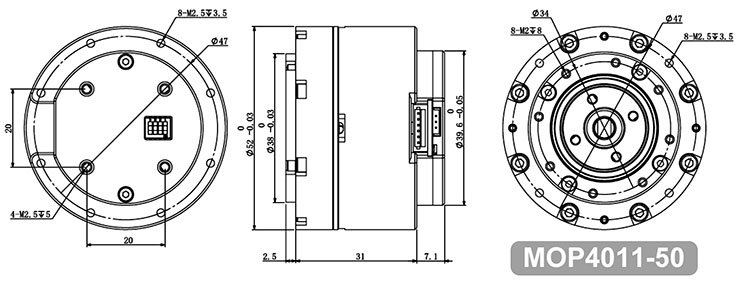
| Motor size: | 52x41mm | |
| Number of poles | pairs | 13 |
| Motor weight | g | 250 |
Drawings
You are welcome to customize the motor, such as: color, reduction ratio, installation hole position, and other specifications!

Related product list for easy finding the suitable one:
| MIT open source software | Commercial software | ||||||||||
| MIT60 | MIT80 | MIT80 Pro | MG6010 | MG6012 Duo | MG8010 | MG8016 | MG8016 Duo | MG10015 | |||
| Motor | Power supply | V | 24 | 24 / 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| Current | A | 7.4 | 7 | 6.5 | 3.8 | 3.8 | 4.9 | 6.5 | 6.5 | 8 | |
| Torque | N.M | 3 | 9 | 13 | 5 | 5 | 9 | 13 | 13 | 30 | |
| Torque const. | N.M/A | 1.3 | 2.4 | 3.1 | 1.32 | 1.32 | 3.00 | 3.30 | 3.30 | 3.85 | |
| Rated speed | rpm | 300 | 160 | 300 | 285 | 285 | 165 | 155 | 155 | 150 | |
| Max speed | rpm | 400 | 245 | 380 | 350 | 350 | 250 | 225 | 225 | 190 | |
| Speed const. | rpm/v | 140 | 100 | 100 | 58 | 62 | 32 | 30 | 30 | 28 | |
| Resistance | Ω | 0.26 | 0.17 | 0.161 | 0.98 | 0.98 | 0.94 | 0.55 | 0.55 | 0.38 | |
| Inductance | mH | 0.112 | 0.057 | 0.073 | 0.55 | 0.55 | 0.73 | 0.54 | 0.54 | 0.45 | |
| Poles | 14 | 21 | 21 | 14 | 14 | 20 | 20 | 20 | 21 | ||
| Motor power | W | 210 | 200 | 480 | 182.4 | 182.4 | 240 | 330 | 330 | 385 | |
| Size | mm | 76x63.5 | 96x39.5 | 96x41.7 | 79x44.7 | 80x44.5 | 98x43 | 99x49.5 | 99x49.5 | 120x50.2 | |
| Max motor temperature | C | 85C | 85C | 85C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | |
| Gearbox | Gear rate | 6:1 | 6:1 | 6:1 | 8:1 | 8:1 | 6:1 | 6:1 | 6:1 | 7:1 | |
| Stall torque | N.M | 9 | 15 | 35 | 11.5 | 11.5 | 21 | 35 | 35 | 50 | |
| Driver | Encoder | 12bit | MA702 15bit | 12bit | 16-bit | 16-bit | 16-bit | 16-bit | 18-bit | 18-bit | |
| Encoders | pcs | 1 | 1 | 1 | 1 | 2 | 1 | 1 | 2 | 1 | |
| Position control mode | kHz | 2 | 2 | 2 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Protection | stall warning | Over current/over heat | |||||||||
| Communication | SmartCAN 1MHz | CAN Bus/RS485 | |||||||||
| Firmware | MIT open source software | Commercial software/ Torque loop/Position loop/Speed loop | |||||||||
| Assembly | Ambient temperature | C | 0-40C | 0-40C | 0-40C | -20-40C | -20-40C | -20-40C | -20-40C | -20-40C | -20-40C |
| Weight | g | 315g | 600g | 714g | 480 | 480 | 630 | 710 | 710 | 1190 |
|
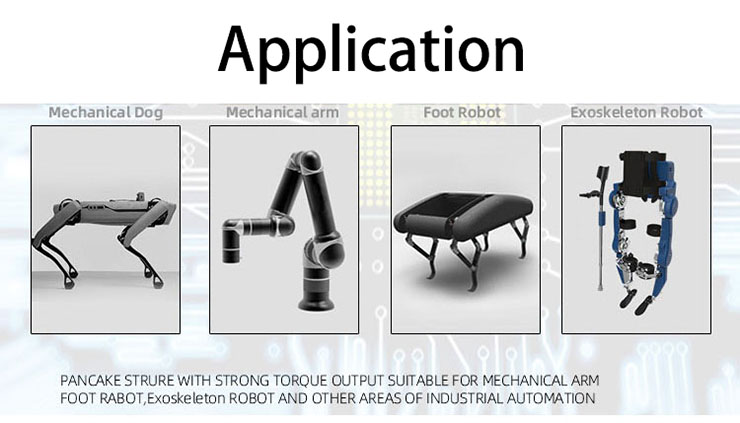
Applications:
Open CAN Protocol
1. CAN bus parameters and single motor command send and receive message format
Bus interface: CAN
Baud rate: 1Mbps
The format of message used to send commands and motor replies to a single motor is as follows:
ID: 0x140 + ID(1~32)
Frame format: DATA
Frame type: Standard
DLC: 8 Byte
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power