Your shopping cart is empty!
 English
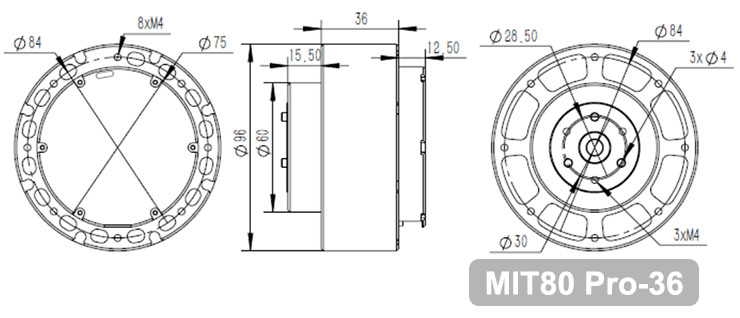
EnglishMIT80 Pro-36 50KV Robot dog motor with gear box 36:1 and MIT driver inside Stator 8115

Product Code: 258115362
Availability: 49990
Availability: 49990
Price: $262.80
Ex Tax: $262.80
Ex Tax: $262.80
3 or more $258.60
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
258115362 MIT80 Pro-36 50KV Robot dog Motor with Gear box 36:1 and MIT Driver inside

Driver: New driver
- Supports MIT CAN protocol.
- Compatible with MIT open source Cheetah FW. https://os.mbed.com/users/benkatz/code/HKC_MiniCheetah/
Notes: The MIT compatible FW is already flashed to the driver. So you need not to flash your FW to the driver. It is convenient to flash the FW since the ST Link socket is at the outside as following picture. If you would like to flash your FW, it is at your own risk.
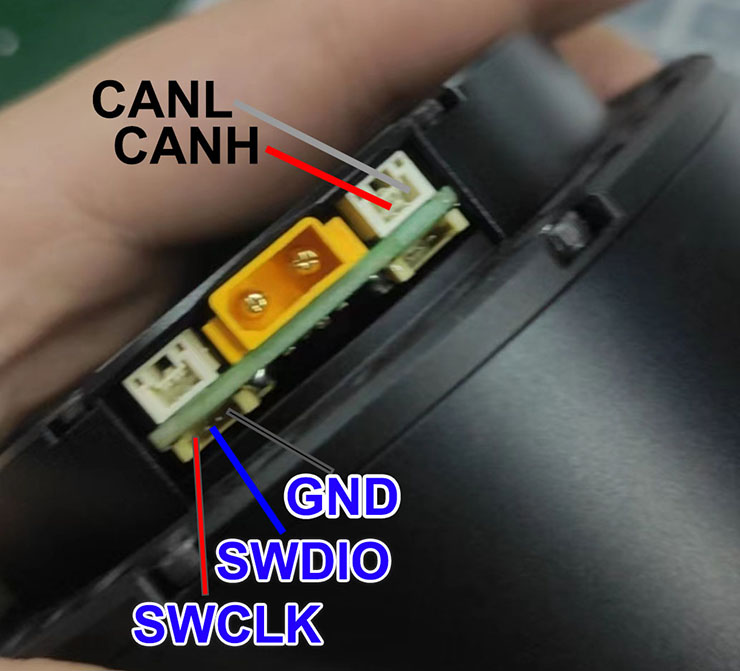
Connector:
XT30 for power
molex 51146-3pin for SWD flash program
molex 51146-3pin for UART
GH1.25-2pin for CANH CANL
GH1.25-2pin for 5V VCC and GND
Specifications:
| MIT60-6 | MIT60-36 | MIT80-6 | MIT80-9 | MIT80-36 | MIT80 Pro-6 | MIT80 Pro-9 | MIT80 Pro-36 | ||
| Motor | Nominal voltage | 24V | 24V | 24V | 24V | 24V | 48V | 48V | 48V |
| Nominal Current | 4A | 4A | 5A | 5A | 5A | 5A | 5A | 5A | |
| Stall Current | 15A | 15A | 20A | 20A | 20A | 20A | 20A | 20A | |
| Norminal Torque | 3Nm | 18Nm | 6Nm | 9Nm | 36Nm | 9Nm | 13Nm | 54Nm | |
| Stall Torque | 9Nm | 45Nm | 15Nm | 22Nm | 90Nm | 25Nm | 35Nm | 150Nm | |
| Rated speed | 300rpm | 50rpm | 200rpm | 130rpm | 35rpm | 180rpm | 120rpm | 30rpm | |
| Max speed | 400rpm | 90rpm | 350rpm | 230rpm | 60rpm | 380rpm | 250rpm | 65rpm | |
| Speed const. | 130rpm/V | 130rpm/V | 100rpm/V | 100rpm/V | 100rpm/V | 50rpm/V | 50rpm/V | 50rpm/V | |
| Resistance | 0.28ohm | 0.28ohm | 0.28ohm | 0.28ohm | 0.28ohm | 0.43ohm | 0.43ohm | 0.43ohm | |
| Inductance | 200uH | 190uH | 170uH | 170uH | 170uH | 270uH | 270uH | 270uH | |
| Torque constant | 0.068Nm/A | 0.068Nm/A | 0.09Nm/A | 0.09Nm/A | 0.09Nm/A | 0.28Nm/A | 0.28Nm/A | 0.28Nm/A | |
| Rotor inertia | 600gcm^2 | 600gcm^2 | 800gcm^2 | 800gcm^2 | 800gcm^2 | 1200gcm^2 | 1200gcm^2 | 1200gcm^2 | |
| Poles | 14 | 14 | 21 | 21 | 21 | 21 | 21 | 21 | |
| Motor power | 90W | 90W | 125W | 125W | 125W | 160W | 160W | 160W | |
| Size | 76x63.5 | 76x63.5 | 96x39.5 | 96x39.5 | 96x39.5 | 96x41.7 | 96x41.7 | 96x41.7 | |
| Max motor temperature | 85C | 85C | 85C | 85C | 85C | 85C | 85C | 85C | |
| Gearbox | Gear rate | 6:1 | 36:1 | 6:1 | 9:1 | 36:1 | 6:1 | 9:1 | 36:1 |
| Stall torque | 9Nm | 45Nm | 15Nm | 22Nm | 90Nm | 25Nm | 35Nm | 150Nm | |
| Driver | Voltage range | 12-36V | 12-36V | 24-48V | 24-48V | 36-48V | 36-48V | 36-48V | 36-48V |
| Encoder | 12bit | 12bit | 12bit | 12bit | 12bit | 12bit | 12bit | 12bit | |
| Position control mode | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | |
| Protection | stall warning | stall warning | stall warning | stall warning | stall warning | stall warning | stall warning | stall warning | |
| Communication | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | |
| Firmware | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | |
| Assembly | Ambient temperature | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C |
| Weight | 318g | 574g | 567g | 567g | 760g | 705g | 705g | 890g |
Drawing:You are welcome to customize the motor, such as: color, reduction ratio, installation hole position, and other specifications!
Related product list for easy finding the suitable one:
| MIT open source software | Commercial software | ||||||||||
| MIT60 | MIT80 | MIT80 Pro | MG6010 | MG6012 Duo | MG8010 | MG8016 | MG8016 Duo | MG10015 | |||
| Motor | Power supply | V | 24 | 24 / 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| Current | A | 7.4 | 7 | 6.5 | 3.8 | 3.8 | 4.9 | 6.5 | 6.5 | 8 | |
| Torque | N.M | 3 | 9 | 13 | 5 | 5 | 9 | 13 | 13 | 30 | |
| Torque const. | N.M/A | 1.3 | 2.4 | 3.1 | 1.32 | 1.32 | 3.00 | 3.30 | 3.30 | 3.85 | |
| Rated speed | rpm | 300 | 160 | 300 | 285 | 285 | 165 | 155 | 155 | 150 | |
| Max speed | rpm | 400 | 245 | 380 | 350 | 350 | 250 | 225 | 225 | 190 | |
| Speed const. | rpm/v | 140 | 100 | 100 | 58 | 62 | 32 | 30 | 30 | 28 | |
| Resistance | Ω | 0.26 | 0.17 | 0.161 | 0.98 | 0.98 | 0.94 | 0.55 | 0.55 | 0.38 | |
| Inductance | mH | 0.112 | 0.057 | 0.073 | 0.55 | 0.55 | 0.73 | 0.54 | 0.54 | 0.45 | |
| Poles | 14 | 21 | 21 | 14 | 14 | 20 | 20 | 20 | 21 | ||
| Motor power | W | 210 | 200 | 480 | 182.4 | 182.4 | 240 | 330 | 330 | 385 | |
| Size | mm | 76x63.5 | 96x39.5 | 96x41.7 | 79x44.7 | 80x44.5 | 98x43 | 99x49.5 | 99x49.5 | 120x50.2 | |
| Max motor temperature | C | 85C | 85C | 85C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | |
| Gearbox | Gear rate | 6:1 | 6:1 | 6:1 | 8:1 | 8:1 | 6:1 | 6:1 | 6:1 | 7:1 | |
| Stall torque | N.M | 9 | 15 | 35 | 11.5 | 11.5 | 21 | 35 | 35 | 50 | |
| Driver | Encoder | 12bit | MA702 15bit | 12bit | 16-bit | 16-bit | 16-bit | 16-bit | 18-bit | 18-bit | |
| Encoders | pcs | 1 | 1 | 1 | 1 | 2 | 1 | 1 | 2 | 1 | |
| Position control mode | kHz | 2 | 2 | 2 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Protection | stall warning | Over current/over heat | |||||||||
| Communication | SmartCAN 1MHz | CAN Bus/RS485 | |||||||||
| Firmware | MIT open source software | Commercial software/ Torque loop/Position loop/Speed loop | |||||||||
| Assembly | Ambient temperature | C | 0-40C | 0-40C | 0-40C | -20-40C | -20-40C | -20-40C | -20-40C | -20-40C | -20-40C |
| Weight | g | 315g | 600g | 714g | 480 | 480 | 630 | 710 | 710 | 1190 |
|
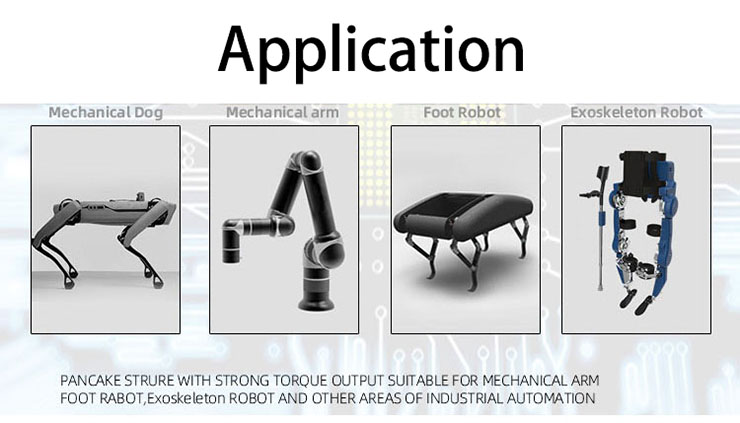
Applications:
Connectors and Wires
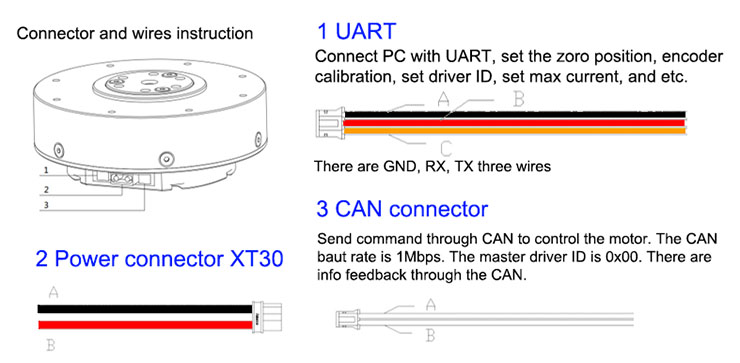
Driver CAN command
Send CAN command to driver to control the motor position, speed, and current.
Special CAN command
1 Enter motor control mode {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFC}
2 Exit motor control mode {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFD}
3 Set current position as zero position {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFE}
Identifier: 0x00 Standard Frame Frame Format: DATA DLC: 8 bytes
| DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | |||
| Data bit | 7-0 | 7-0 | 7-0 | 7-0 | 7-4 | 3-0 | 7-0 | 7-4 | 3-0 | 7-0 |
| Content | high 8 bits | low 8 bits | high 8 bits | low 4 bits | high 4 bits | low 8 bits | high 8 bits | low 4 bits | high 4 bits | low 4 bits |
| Motor position | Motor speed | KP | KD | torque | ||||||
| Value | -95.5 to 95.5 rad | -30 to 30 rad/s | -18 to 18 Nm | |||||||
Motor CAN feedback
Identifier: 0x00 + Driver ID Standard Frame Frame Format: DATA DLC: 8 bytes
| DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | ||
| Data bit | 7-0 | 7-0 | 7-0 | 7-0 | 7-4 | 3-0 | 7-0 |
| Content | 8 bits | high 8 bits | low 8 bits | High 8 bits | low 4 bits | high 4 bits | low 8 bits |
| Driver ID | Motor position | Motor speed | Motor torque | ||||
| Value | -95.5 to 95.5 rad | -30 to 30 rad/s | -18 to 18 Nm | ||||
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power