Your shopping cart is empty!
 English
EnglishMIT60-36 V3 130KV Robot dog motor with gear box 36:1 and ZE CAN & RS485 driver inside Stator 6010

Product Code: 256010365
Availability: 50000
Availability: 50000
Price: $210.60
Ex Tax: $210.60
Ex Tax: $210.60
3 or more $207.80
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
256010365 MIT60-36 V3 Robot dog Motor with Gear box 36:1 plus ZE CAN & RS485 Driver, Stator 6010
Driver: V3
- Supports CAN & RS485 protocol Simultaneously.
- Has PC GUI program.
- Has Individual mode ID: 0x01 to 0xFE. Send the command to individual driver, such as 0x01, only the 0x01 driver carries out the command and replies to the command.
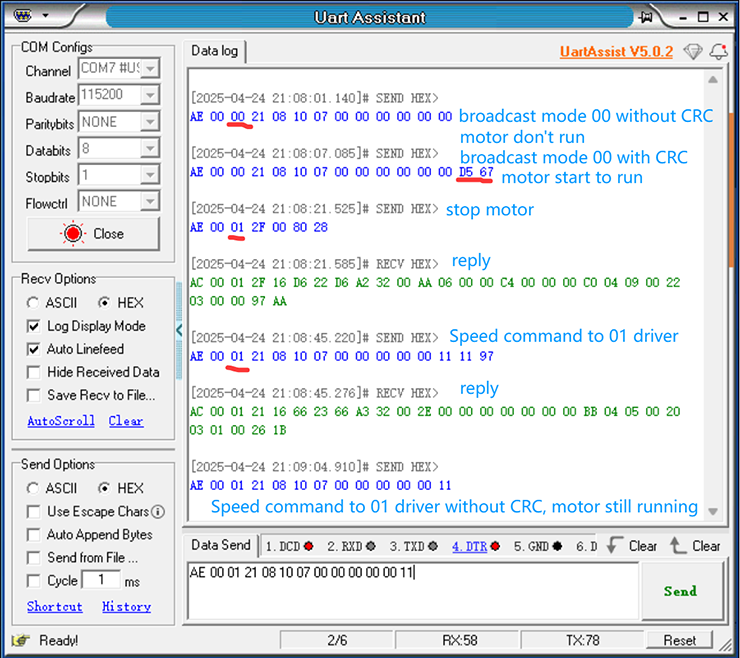
- Has Broadcast mode ID: 0x00 to send the command to all drivers. All drivers will carry out the commad, but do not reply to the command.
- Has Public mode ID: 0xFF to send the command to all drivers. All drivers will carry out the command, and reply to the command. The Public mode is for CAN only. Please don't use Public mode on RS485 since it will burn the driver circuit.
The following is a sample on RS485 command control.
Specifications:
| MIT60-6 | MIT60-36 | MIT80-6 | MIT80-9 | MIT80-36 | MIT80 Pro-6 | MIT80 Pro-9 | MIT80 Pro-36 | ||
| Motor | Nominal voltage | 24V | 24V | 24V | 24V | 24V | 48V | 48V | 48V |
| Nominal Current | 4A | 4A | 12A | 12A | 12A | 5A | 5A | 5A | |
| Stall Current | 15A | 15A | 24A | 24A | 24A | 20A | 20A | 20A | |
| Norminal Torque | 3Nm | 18Nm | 6Nm | 9Nm | 36Nm | 9Nm | 13Nm | 54Nm | |
| Stall Torque | 9Nm | 45Nm | 15Nm | 18Nm | 90Nm | 25Nm | 35Nm | 150Nm | |
| Rated speed | 300rpm | 50rpm | 200rpm | 130rpm | 35rpm | 180rpm | 120rpm | 30rpm | |
| Max speed | 400rpm | 90rpm | 350rpm | 245rpm | 60rpm | 380rpm | 250rpm | 65rpm | |
| Speed const. | 130rpm/V | 130rpm/V | 100rpm/V | 100rpm/V | 100rpm/V | 50rpm/V | 50rpm/V | 50rpm/V | |
| Resistance | 0.28ohm | 0.28ohm | 0.28ohm | 0.28ohm | 0.28ohm | 0.43ohm | 0.43ohm | 0.43ohm | |
| Inductance | 200uH | 190uH | 170uH | 170uH | 170uH | 270uH | 270uH | 270uH | |
| Torque constant | 0.068Nm/A | 0.068Nm/A | 0.09Nm/A | 0.09Nm/A | 0.09Nm/A | 0.28Nm/A | 0.28Nm/A | 0.28Nm/A | |
| Rotor inertia | 600gcm^2 | 600gcm^2 | 800gcm^2 | 800gcm^2 | 800gcm^2 | 1200gcm^2 | 1200gcm^2 | 1200gcm^2 | |
| Poles | 14 | 14 | 21 | 21 | 21 | 21 | 21 | 21 | |
| Motor power | 90W | 90W | 125W | 125W | 125W | 160W | 160W | 160W | |
| Size | 76x63.5 | 76x63.5 | 96x39.5 | 96x39.5 | 96x39.5 | 96x41.7 | 96x41.7 | 96x41.7 | |
| Max motor temperature | 85C | 85C | 85C | 85C | 85C | 85C | 85C | 85C | |
| Gearbox | Gear rate | 6:1 | 36:1 | 6:1 | 9:1 | 36:1 | 6:1 | 9:1 | 36:1 |
| Stall torque | 9Nm | 45Nm | 15Nm | 22Nm | 90Nm | 25Nm | 35Nm | 150Nm | |
| Driver | Voltage range | 12-36V | 12-36V | 24-48V | 24-48V | 36-48V | 36-48V | 36-48V | 36-48V |
| Encoder | 12bit | 12bit | 12bit | 12bit | 12bit | 12bit | 12bit | 12bit | |
| Position control mode | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | 2KHz | |
| Protection | stall warning | stall warning | stall warning | stall warning | stall warning | stall warning | stall warning | stall warning | |
| Communication | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | SmartCAN 1MHz | |
| Firmware | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | MIT open source software | |
| Assembly | Ambient temperature | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C | 0-40C |
| Weight | 318g | 574g | 567g | 567g | 760g | 705g | 705g | 890g |
You are welcome to customize the motor, such as: color, reduction ratio, installation hole position, and other specifications!
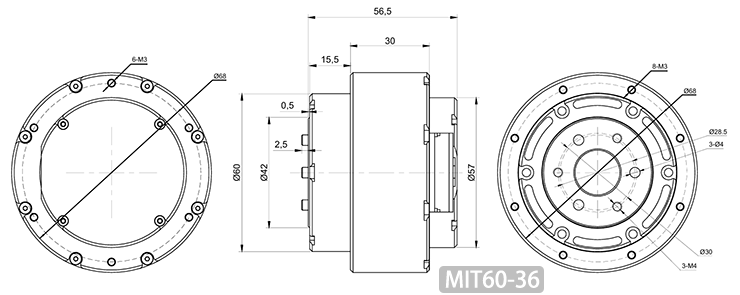
Drawing:
Related product list for easy finding the suitable one:
| MIT open source software | Commercial software | ||||||||||
| MIT60 | MIT80 | MIT80 Pro | MG6010 | MG6012 Duo | MG8010 | MG8016 | MG8016 Duo | MG10015 | |||
| Motor | Power supply | V | 24 | 24 / 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| Current | A | 7.4 | 7 | 6.5 | 3.8 | 3.8 | 4.9 | 6.5 | 6.5 | 8 | |
| Torque | N.M | 3 | 9 | 13 | 5 | 5 | 9 | 13 | 13 | 30 | |
| Torque const. | N.M/A | 1.3 | 2.4 | 3.1 | 1.32 | 1.32 | 3.00 | 3.30 | 3.30 | 3.85 | |
| Rated speed | rpm | 300 | 160 | 300 | 285 | 285 | 165 | 155 | 155 | 150 | |
| Max speed | rpm | 400 | 245 | 380 | 350 | 350 | 250 | 225 | 225 | 190 | |
| Speed const. | rpm/v | 140 | 100 | 100 | 58 | 62 | 32 | 30 | 30 | 28 | |
| Resistance | Ω | 0.26 | 0.17 | 0.161 | 0.98 | 0.98 | 0.94 | 0.55 | 0.55 | 0.38 | |
| Inductance | mH | 0.112 | 0.057 | 0.073 | 0.55 | 0.55 | 0.73 | 0.54 | 0.54 | 0.45 | |
| Poles | 14 | 21 | 21 | 14 | 14 | 20 | 20 | 20 | 21 | ||
| Motor power | W | 210 | 200 | 480 | 182.4 | 182.4 | 240 | 330 | 330 | 385 | |
| Size | mm | 76x63.5 | 96x39.5 | 96x41.7 | 79x44.7 | 80x44.5 | 98x43 | 99x49.5 | 99x49.5 | 120x50.2 | |
| Max motor temperature | C | 85C | 85C | 85C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | |
| Gearbox | Gear rate | 6:1 | 6:1 | 6:1 | 8:1 | 8:1 | 6:1 | 6:1 | 6:1 | 7:1 | |
| Stall torque | N.M | 9 | 15 | 35 | 11.5 | 11.5 | 21 | 35 | 35 | 50 | |
| Driver | Encoder | 12bit | MA702 15bit | 12bit | 16-bit | 16-bit | 16-bit | 16-bit | 18-bit | 18-bit | |
| Encoders | pcs | 1 | 1 | 1 | 1 | 2 | 1 | 1 | 2 | 1 | |
| Position control mode | kHz | 2 | 2 | 2 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Protection | stall warning | Over current/over heat | |||||||||
| Communication | SmartCAN 1MHz | CAN Bus/RS485 | |||||||||
| Firmware | MIT open source software | Commercial software/ Torque loop/Position loop/Speed loop | |||||||||
| Assembly | Ambient temperature | C | 0-40C | 0-40C | 0-40C | -20-40C | -20-40C | -20-40C | -20-40C | -20-40C | -20-40C |
| Weight | g | 315g | 600g | 714g | 480 | 480 | 630 | 710 | 710 | 1190 | |
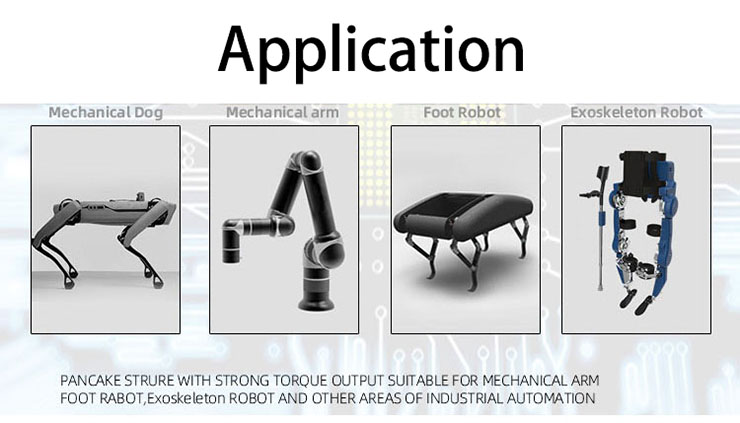
Applications:
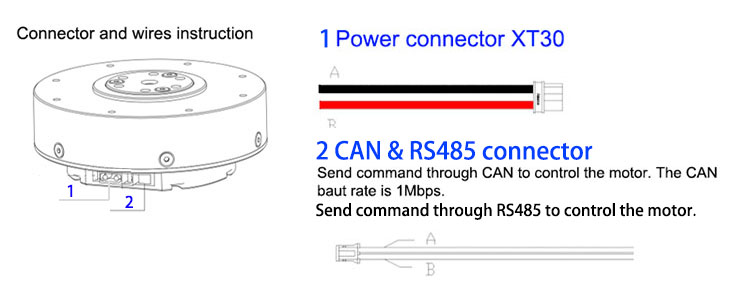
Connectors and Wires
RS485 Protocol
| Field Name | Byte | Description |
| Header | 1 byte | Master header is 0xAE,Slave header is 0xAC; |
| Package Serial number | 1 byte | The master package serial number and slaver package serial number are same |
| Driver ID | 1 byte |
Driver ID is 0X01-0xFE; |
| Command | 1 byte | Function command |
| Data length | 1 byte | Data length, it can be 0 |
| Data | 0- | The data following the command |
| CRC | 2 byte | CRC16-Modbus |
Sample: AE 00 01 21 08 D0 07 00 00 00 00 00 00 DD CB // Run the 0x01 motor at speed 20RPM
CAN Protocol
| CAN | Description |
| StdID | CAN ID | 0x100 |
| DLC | Data length |
| Data[0] | Command code |
| Data[1] - Data[7] | Data |
Sample: CAN ID: 0x101, DLC: 5, Data: C1 D0 07 00 00 // Run the 0x01 motor at speed 20RPM
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power