Your shopping cart is empty!
 English
EnglishGIM4310-36 Robot dog motor with 36:1 gear box Stator 4310 10Nm 110KV with ZE RS485 & CAN Driver

Price: $184.80
Ex Tax: $184.80
Ex Tax: $184.80
6 or more $183.60
12 or more $182.80
12 or more $182.80
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
2564310363 GIM4310-36 Robot dog motor with 10:1 gear box Stator 4310 10Nm 110KV with ZE RS485 & CAN Driver
Driver Communication: SmartCAN 1MHz & PWM
Driver Firmware: Compatible with MIT open source software

Specifications:
| GIM Series Motor with GearBox 35 & 43 | ||||||||||
| GIM | 3505-8 | 3505-9 | 3505-36 | 3510-8 | 3510-64 | 4305-10 | 4310-10 | 4310-36 | 4310-40 | 4315-8 |
| Nominal Voltage V | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 |
| Voltage Range V | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 |
| Nominal Current A | 1.4 | 1.6 | 1.7 | 3.3 | 3.41 | 4.0 | 3.5 | 3.0 | 3.7 | 1.86 |
| Max Current A | 2.5 | 4.19 | 4.54 | 28.94 | 25.58 | 13 | 15 | 12 | 17.1 | 19.5 |
| Nominal Torque Nm | 0.43 | 0.71 | 3.12 | 1 | 9 | 0.85 | 3 | 6 | 8.5 | 1.6 |
| Max Torque Nm | 0.85 | 1.95 | 8.01 | 6.28 | 50 | 3 | 5.8 | 18 | 30.59 | 14.25 |
| Torque const. Nm/A | 0.41 | 0.35 | 2.0 | 0.28 | 2.84 | 0.21 | 0.66 | 1.5 | 1.79 | 0.96 |
| Planet Gear box Rate | 8:1 | 9:1 | 36:1 | 8:1 | 64:1 | 10:1 | 10:1 | 36:1 | 40:1 | 8:1 |
| Rated Gear shaft rpm | 234 | 258 | 50 | 534 | 67 | 200 | 100 | 28 | 70 | 350 |
| Max Gear shaft rpm | 306 | 380 | 97 | 588 | 74 | 540 | 300 | 85 | 86 | 405 |
| Speed const. KV | 13 | 15.83 | 4.04 | 24.5 | 3.08 | 15 | 9 | 2.5 | 3.58 | 16.88 |
| Res ohm | 4.03 | 4.47 | 4.47 | 0.52 | 0.52 | 0.64 | 1.05 | 0.97 | 0.27 | 1.5 |
| L mH | 0.43 | 0.45 | 0.45 | 0.29 | 0.29 | 0.17 | 0.34 | 0.33 | 0.8 | 0.43 |
| Poles pairs | 11 | 11 | 11 | 7 | 7 | 14 | 14 | 14 | 14 | 14 |
| Motor power W | 9 | 38 | 41 | 79 | 82 | 20 | 20 | 12 | 89 | 45 |
| Size dia mm | 43 | 45 | 45 | 46 | 46 | 53 | 53 | 55 | 57 | 57 |
| Size L mm | 30 | 36.1 | 44.1 | 51.5 | 77.5 | 26 | 32 | 47 | 56 | 58 |
| Max motor temp. 0C | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 |
| Gear backlash arcmin | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 |
| Encoder bit | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
| Weight g | 97 | 132 | 178 | 259.6 | 507 | 150 | 227 | 310 | 385 | 372 |
| GIM Series Motor with GearBox 60, 81 &100 | |||||||||||||||||||||
| GIM | 6010-6 |
6010-8-Lite |
6010-36 | 8108-6 | 8108-8-Lite | 8108-9 | 8108-36 | 8115-6 | 8115-9 | 8115-36 | 10015-9 | ||||||||||
| Motor | Nominal Voltage V |
24 | 24 | 24 | 24 | 24 | 24 | 48 | 48 | 24 | 48 | 24 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 24 | 48 |
| Voltage Range V | 12-36 | 24-48 | 24-56 | 24-48 | 36-48 | 10-40 | 24-48 | ||||||||||||||
| Nominal Current A | 24 | 4 | 10.5 | 8 | 4 | 5 | 14.5 | 7 | 5 | 15 | 5 | 16 | 16 | 5 | 9.5 | 5 | 9.5 | 5 | 17.5 | 12 | |
| Max Current A | 40 | 15 | 25 | 20 | 15 | 20 | 45 | 25 | 20 | 45 | 20 | 45 | 45 | 20 | 45 | 20 | 25 | 20 | 35 | 35 | |
| Nominal Torque Nm | 3 | 3 | 5 | 24 | 18 | 6 | 6.5 | 7.5 | 9 | 9 | 36 | 33 | 11 | 9 | 17 | 13 | 45 | 54 | 25 | 28 | |
| Max Torque Nm | 9 | 9 | 11 | 58 | 45 | 15 | 17 | 22 | 22 | 22 | 90 | 93 | 29.5 | 25 | 45 | 35 | 115 | 150 | 60 | 70 | |
| Torque const. Nm/A | 0.1 | 0.07 | 0.47 | 3.05 | 0.07 | 0.09 | 0.45 | 1.0 | 0.09 | 0.6 | 0.09 | 2.05 | 0.7 | 0.28 | 1.55 | 0.28 | 4.8 | .28 | 1.37 | 2.41 | |
| Rated Gear shaft speed rpm | 320 | 300 | 120 | 30 | 50 | 200 | 250 | 110 | 130 | 180 | 35 | 40 | 140 | 180 | 110 | 120 | 15 | 30 | 50 | 45 | |
| Max Gear shaft speed rpm | 670 | 400 | 420 | 69 | 90 | 350 | 650 | 320 | 230 | 400 | 65 | 110 | 330 | 380 | 220 | 250 | 36 | 65 | 155 | 122 | |
| Speed const. KV | 19 | 130 | 12 | 1.9 | 130 | 100 | 14 | 5.7 | 100 | 9.4 | 100 | 2.5 | 7.1 | 50 | 4.8 | 50 | 4.8 | 50 | 4.5 | 2.5 | |
| Res ohm | 0.32 | 0.28 | 0.21 | 0.32 | 0.2 | 0.28 | 0.13 | 0.44 | 0.28 | 0.16 | 0.28 | 0.12 | 0.23 | 0.43 | 0.23 | 0.43 | 0.54 | 0.43 | 0.14 | 0.43 | |
| L mH | 0.2 | 0.2 | 0.12 | 0.23 | 0.19 | 0.17 | 0.06 | 0.04 | 0.17 | 0.05 | 0.17 | 0.05 | 0.09 | 0.27 | 0.26 | 0.27 | 0.26 | 0.27 | 0.09 | 0.27 | |
| Poles pairs | 14 | 14 | 14 | 14 | 14 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | |
| Motor power W | 85 | 90 | 65 | 75 | 90 | 125 | 170 | 80 | 125 | 170 | 125 | 135 | 160 | 160 | 195 | 160 | 85 | 160 | 130 | 130 | |
| Size dia mm | 76 | 76 | 80 | 76 | 76 | 96 | 96 | 92 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 122 | 122 | |
| Size L mm | 35 | 35 | 40 | 56.5 | 56.5 | 41.5 | 41.5 | 55 | 41.5 | 41.5 | 57 | 57 | 48.5 | 48.5 | 48.5 | 48.5 | 64 | 64 | 57.5 | 57.5 | |
| Max motor temp. 0C | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | |
| Gear box |
Type | Planetary | |||||||||||||||||||
| Gear rate | 6:1 | 6:1 | 8:1 | 36:1 | 36:1 | 6:1 | 6:1 | 8:1 | 9:1 | 9:1 | 36:1 | 36:1 | 6:1 | 6:1 | 9:1 | 9:1 | 36:1 | 36:1 | 9:1 | 9:1 | |
| Stall torque Nm | 40 | 15 | 25 | 20 | 15 | 20 | 45 | 25 | 20 | 45 | 20 | 45 | 45 | 20 | 45 | 20 | 25 | 20 | 35 | 35 | |
| Gear backlash arcmin |
15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | |
| Gear material | Steel | ||||||||||||||||||||
| Driver | Encoder | ||||||||||||||||||||
| Position control mode |
2KHZ | ||||||||||||||||||||
| Protection | Stall OTP | ||||||||||||||||||||
| Communication |
UART / CAN |
||||||||||||||||||||
| FW | MIT / ZE / CB | OD ZE |
MIT / ZE / CB | OD ZE |
MIT / ZE / CB | ||||||||||||||||
|
Motor & Gear |
Ambient temp. 0C | 0-40 | |||||||||||||||||||
| Max. Axial load N | 600 | 600 | 600 | 900 | 900 | 800 | 800 | 800 | 800 | 800 | 900 | 900 | 800 | 800 | 800 | 800 | 900 | 900 | 5k | 5k | |
| Max. Radial load N | 800 | 800 | 800 | 1k | 1k | 900 | 900 | 900 | 900 | 900 | 1k | 1k | 900 | 900 | 900 | 900 | 1k | 1k | 5k | 5k | |
| Size dia mm | 76 | 76 | 80 | 76 | 76 | 96 | 96 | 92 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 122 | 122 | |
| Size L mm | 35 | 35 | 40 | 56.5 | 56.5 | 41.5 | 41.5 | 55 | 41.5 | 41.5 | 57 | 57 | 48.5 | 48.5 | 48.5 | 48.5 | 64 | 64 | 57.5 | 57.5 | |
| Weight g | 318 | 318 | 388 | 574 | 574 | 567 | 567 | 396 | 567 | 567 | 760 | 760 | 705 | 705 | 705 | 705 | 960 | 960 | 1372 | 1372 | |
CB = Cyberbeast Driver
ZE = ZE300 RS485 & CAN Driver
MIT = MIT compatiable Driver
OD = ODrive
13X = 1372 g
Driver: ZE RS485 & CAN
1. Support RS485 and CAN simultaneously
2. Support Customized RS485 and Customized CAN protocol.
3. Support Modbus protocol.
4. Support CANOpen protocol.
5. Support MIT CAN protocol.
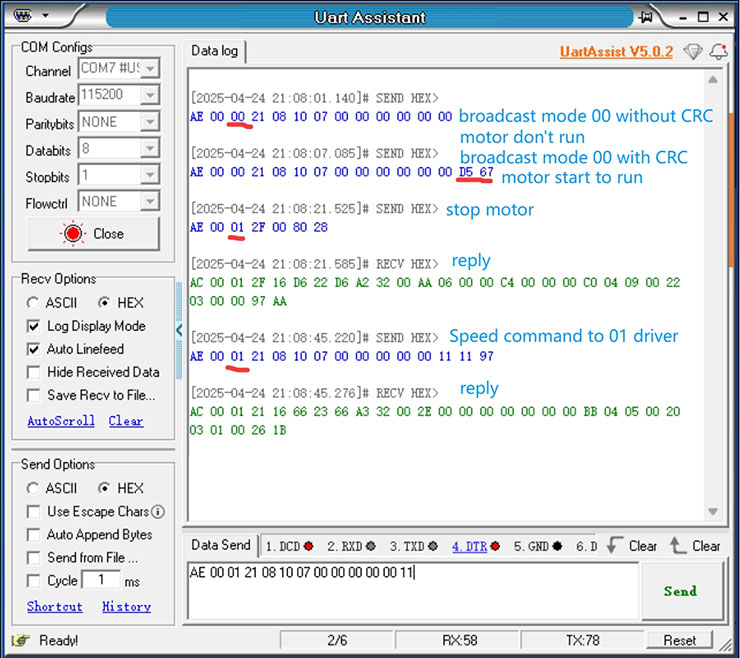
6. Support Broadcast mode. Master and slaver can receive the command, but the slaver doesn't reply to the master
7. Support Public mode. All slaver receive the command, and reply to the command. Can not use Pubic ID with RS485
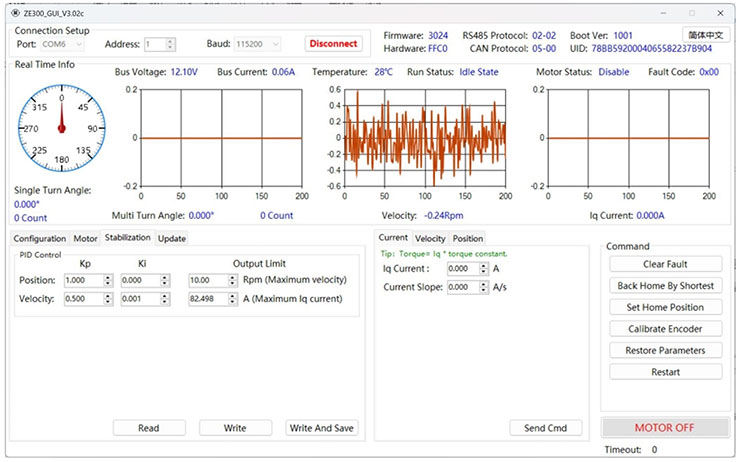
Windows PC setting and control program.
RS485 Windows Control sample
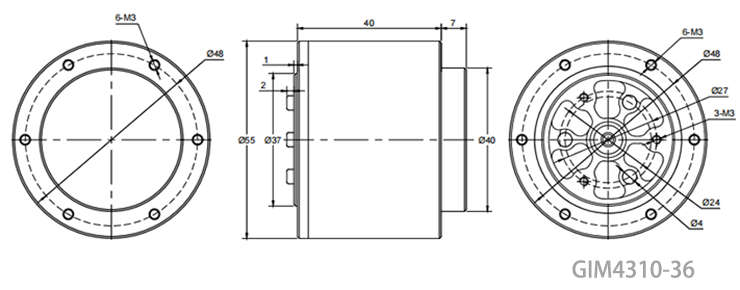
Drawing:You are welcome to customize the motor, such as: color, reduction ratio, installation hole position, and other specifications!
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power