Your shopping cart is empty!
 English
EnglishGIM4310-36 Robot dog motor with 36:1 gear box Stator 4310 10Nm 110KV with AS5047 encoder

Price: $118.88
Ex Tax: $118.88
Ex Tax: $118.88
6 or more $117.80
12 or more $116.68
12 or more $116.68
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
2564310361 GIM4310-36 Robot dog motor with 36:1 gear box Stator 4310 10Nm 110KV with AS5047 encoder
GIM4310 110KV motor can be over 2600RPM. This speed is too fast for AS5048A encoder. AS5047 encoder is needed for this motor.
Please note that the AS5047 encoder is installed on motor side. If you need the AS5047 encoder to be installed on the gearbox side, you need to customize the installation by yourself.

Specifications:
| GIM Series Motor with GearBox 35 & 43 | ||||||||||
| GIM | 3505-8 | 3505-9 | 3505-36 | 3510-8 | 3510-64 | 4305-10 | 4310-10 | 4310-36 | 4310-40 | 4315-8 |
| Nominal Voltage V | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 |
| Voltage Range V | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 |
| Nominal Current A | 1.4 | 1.6 | 1.7 | 3.3 | 3.41 | 4.0 | 3.5 | 3.0 | 3.7 | 1.86 |
| Max Current A | 2.5 | 4.19 | 4.54 | 28.94 | 25.58 | 13 | 15 | 12 | 17.1 | 19.5 |
| Nominal Torque Nm | 0.43 | 0.71 | 3.12 | 1 | 9 | 0.85 | 3 | 6 | 8.5 | 1.6 |
| Max Torque Nm | 0.85 | 1.95 | 8.01 | 6.28 | 50 | 3 | 5.8 | 18 | 30.59 | 14.25 |
| Torque const. Nm/A | 0.41 | 0.35 | 2.0 | 0.28 | 2.84 | 0.21 | 0.66 | 1.5 | 1.79 | 0.96 |
| Planet Gear box Rate | 8:1 | 9:1 | 36:1 | 8:1 | 64:1 | 10:1 | 10:1 | 36:1 | 40:1 | 8:1 |
| Rated Gear shaft rpm | 234 | 258 | 50 | 534 | 67 | 200 | 100 | 28 | 70 | 350 |
| Max Gear shaft rpm | 306 | 380 | 97 | 588 | 74 | 540 | 300 | 85 | 86 | 405 |
| Speed const. KV | 13 | 15.83 | 4.04 | 24.5 | 3.08 | 15 | 9 | 2.5 | 3.58 | 16.88 |
| Res ohm | 4.03 | 4.47 | 4.47 | 0.52 | 0.52 | 0.64 | 1.05 | 0.97 | 0.27 | 1.5 |
| L mH | 0.43 | 0.45 | 0.45 | 0.29 | 0.29 | 0.17 | 0.34 | 0.33 | 0.8 | 0.43 |
| Poles pairs | 11 | 11 | 11 | 7 | 7 | 14 | 14 | 14 | 14 | 14 |
| Motor power W | 9 | 38 | 41 | 79 | 82 | 20 | 20 | 12 | 89 | 45 |
| Size dia mm | 43 | 45 | 45 | 46 | 46 | 53 | 53 | 55 | 57 | 57 |
| Size L mm | 30 | 36.1 | 44.1 | 51.5 | 77.5 | 26 | 32 | 47 | 56 | 58 |
| Max motor temp. 0C | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 |
| Gear backlash arcmin | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 |
| Encoder bit | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
| Weight g | 97 | 132 | 178 | 259.6 | 507 | 150 | 227 | 310 | 385 | 372 |
| GIM Series Motor with GearBox 60, 81 &100 | |||||||||||||||||||||
| GIM | 6010-6 |
6010-8-Lite |
6010-36 | 8108-6 | 8108-8-Lite | 8108-9 | 8108-36 | 8115-6 | 8115-9 | 8115-36 | 10015-9 | ||||||||||
| Motor | Nominal Voltage V |
24 | 24 | 24 | 24 | 24 | 24 | 48 | 48 | 24 | 48 | 24 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 24 | 48 |
| Voltage Range V | 12-36 | 24-48 | 24-56 | 24-48 | 36-48 | 10-40 | 24-48 | ||||||||||||||
| Nominal Current A | 24 | 4 | 10.5 | 8 | 4 | 5 | 14.5 | 7 | 5 | 15 | 5 | 16 | 16 | 5 | 9.5 | 5 | 9.5 | 5 | 17.5 | 12 | |
| Max Current A | 40 | 15 | 25 | 20 | 15 | 20 | 45 | 25 | 20 | 45 | 20 | 45 | 45 | 20 | 45 | 20 | 25 | 20 | 35 | 35 | |
| Nominal Torque Nm | 3 | 3 | 5 | 24 | 18 | 6 | 6.5 | 7.5 | 9 | 9 | 36 | 33 | 11 | 9 | 17 | 13 | 45 | 54 | 25 | 28 | |
| Max Torque Nm | 9 | 9 | 11 | 58 | 45 | 15 | 17 | 22 | 22 | 22 | 90 | 93 | 29.5 | 25 | 45 | 35 | 115 | 150 | 60 | 70 | |
| Torque const. Nm/A | 0.1 | 0.07 | 0.47 | 3.05 | 0.07 | 0.09 | 0.45 | 1.0 | 0.09 | 0.6 | 0.09 | 2.05 | 0.7 | 0.28 | 1.55 | 0.28 | 4.8 | .28 | 1.37 | 2.41 | |
| Rated Gear shaft speed rpm | 320 | 300 | 120 | 30 | 50 | 200 | 250 | 110 | 130 | 180 | 35 | 40 | 140 | 180 | 110 | 120 | 15 | 30 | 50 | 45 | |
| Max Gear shaft speed rpm | 670 | 400 | 420 | 69 | 90 | 350 | 650 | 320 | 230 | 400 | 65 | 110 | 330 | 380 | 220 | 250 | 36 | 65 | 155 | 122 | |
| Speed const. KV | 19 | 130 | 12 | 1.9 | 130 | 100 | 14 | 5.7 | 100 | 9.4 | 100 | 2.5 | 7.1 | 50 | 4.8 | 50 | 4.8 | 50 | 4.5 | 2.5 | |
| Res ohm | 0.32 | 0.28 | 0.21 | 0.32 | 0.2 | 0.28 | 0.13 | 0.44 | 0.28 | 0.16 | 0.28 | 0.12 | 0.23 | 0.43 | 0.23 | 0.43 | 0.54 | 0.43 | 0.14 | 0.43 | |
| L mH | 0.2 | 0.2 | 0.12 | 0.23 | 0.19 | 0.17 | 0.06 | 0.04 | 0.17 | 0.05 | 0.17 | 0.05 | 0.09 | 0.27 | 0.26 | 0.27 | 0.26 | 0.27 | 0.09 | 0.27 | |
| Poles pairs | 14 | 14 | 14 | 14 | 14 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | |
| Motor power W | 85 | 90 | 65 | 75 | 90 | 125 | 170 | 80 | 125 | 170 | 125 | 135 | 160 | 160 | 195 | 160 | 85 | 160 | 130 | 130 | |
| Size dia mm | 76 | 76 | 80 | 76 | 76 | 96 | 96 | 92 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 122 | 122 | |
| Size L mm | 35 | 35 | 40 | 56.5 | 56.5 | 41.5 | 41.5 | 55 | 41.5 | 41.5 | 57 | 57 | 48.5 | 48.5 | 48.5 | 48.5 | 64 | 64 | 57.5 | 57.5 | |
| Max motor temp. 0C | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | |
| Gear box |
Type | Planetary | |||||||||||||||||||
| Gear rate | 6:1 | 6:1 | 8:1 | 36:1 | 36:1 | 6:1 | 6:1 | 8:1 | 9:1 | 9:1 | 36:1 | 36:1 | 6:1 | 6:1 | 9:1 | 9:1 | 36:1 | 36:1 | 9:1 | 9:1 | |
| Stall torque Nm | 40 | 15 | 25 | 20 | 15 | 20 | 45 | 25 | 20 | 45 | 20 | 45 | 45 | 20 | 45 | 20 | 25 | 20 | 35 | 35 | |
| Gear backlash arcmin |
15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | |
| Gear material | Steel | ||||||||||||||||||||
| Driver | Encoder | ||||||||||||||||||||
| Position control mode |
2KHZ | ||||||||||||||||||||
| Protection | Stall OTP | ||||||||||||||||||||
| Communication |
UART / CAN |
||||||||||||||||||||
| FW | MIT / ZE / CB | OD ZE |
MIT / ZE / CB | OD ZE |
MIT / ZE / CB | ||||||||||||||||
|
Motor & Gear |
Ambient temp. 0C | 0-40 | |||||||||||||||||||
| Max. Axial load N | 600 | 600 | 600 | 900 | 900 | 800 | 800 | 800 | 800 | 800 | 900 | 900 | 800 | 800 | 800 | 800 | 900 | 900 | 5k | 5k | |
| Max. Radial load N | 800 | 800 | 800 | 1k | 1k | 900 | 900 | 900 | 900 | 900 | 1k | 1k | 900 | 900 | 900 | 900 | 1k | 1k | 5k | 5k | |
| Size dia mm | 76 | 76 | 80 | 76 | 76 | 96 | 96 | 92 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 122 | 122 | |
| Size L mm | 35 | 35 | 40 | 56.5 | 56.5 | 41.5 | 41.5 | 55 | 41.5 | 41.5 | 57 | 57 | 48.5 | 48.5 | 48.5 | 48.5 | 64 | 64 | 57.5 | 57.5 | |
| Weight g | 318 | 318 | 388 | 574 | 574 | 567 | 567 | 396 | 567 | 567 | 760 | 760 | 705 | 705 | 705 | 705 | 960 | 960 | 1372 | 1372 | |
Encoder connection:
AS5047 uses SPI 4 wires connection. The connector is JST-GH 1.25. The following is the wires SPI names.

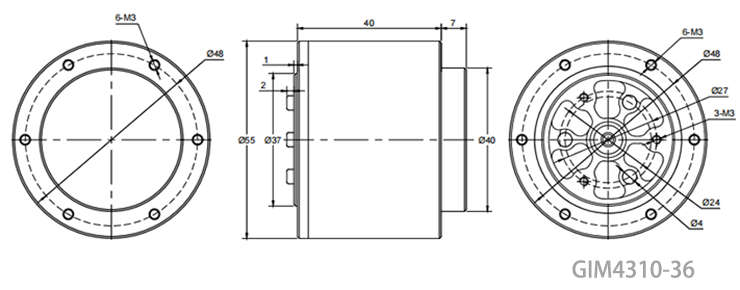
Drawing:You are welcome to customize the motor, such as: color, reduction ratio, installation hole position, and other specifications!
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power