Your shopping cart is empty!
 English
EnglishGIM4310-10 Robot dog motor with 10:1 gear box Stator 4310 3Nm 110KV with MIT CAN Driver

Price: $164.28
Ex Tax: $164.28
Ex Tax: $164.28
6 or more $161.20
12 or more $158.80
12 or more $158.80
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
25643107 GIM4310 Robot dog motor with 10:1 gear box Stator 4310 3Nm 110KV with MIT CAN Driver
Driver Communication: SmartCAN 1MHz & PWM
Driver Firmware: has MIT mode CAN communication


Specifications:
| GIM Series Motor with GearBox 35 & 43 | ||||||||||
| GIM | 3505-8 | 3505-9 | 3505-36 | 3510-8 | 3510-64 | 4305-10 | 4310-10 | 4310-36 | 4310-40 | 4315-8 |
| Nominal Voltage V | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 24 |
| Voltage Range V | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 | 12-40 |
| Nominal Current A | 1.4 | 1.6 | 1.7 | 3.3 | 3.41 | 4.0 | 3.5 | 3.0 | 3.7 | 1.86 |
| Max Current A | 2.5 | 4.19 | 4.54 | 28.94 | 25.58 | 13 | 15 | 12 | 17.1 | 19.5 |
| Nominal Torque Nm | 0.43 | 0.71 | 3.12 | 1 | 9 | 0.85 | 3 | 6 | 8.5 | 1.6 |
| Max Torque Nm | 0.85 | 1.95 | 8.01 | 6.28 | 50 | 3 | 5.8 | 18 | 30.59 | 14.25 |
| Torque const. Nm/A | 0.41 | 0.35 | 2.0 | 0.28 | 2.84 | 0.21 | 0.66 | 1.5 | 1.79 | 0.96 |
| Planet Gear box Rate | 8:1 | 9:1 | 36:1 | 8:1 | 64:1 | 10:1 | 10:1 | 36:1 | 40:1 | 8:1 |
| Rated Gear shaft rpm | 234 | 258 | 50 | 534 | 67 | 200 | 100 | 28 | 70 | 350 |
| Max Gear shaft rpm | 306 | 380 | 97 | 588 | 74 | 540 | 300 | 85 | 86 | 405 |
| Speed const. KV | 13 | 15.83 | 4.04 | 24.5 | 3.08 | 15 | 9 | 2.5 | 3.58 | 16.88 |
| Res ohm | 4.03 | 4.47 | 4.47 | 0.52 | 0.52 | 0.64 | 1.05 | 0.97 | 0.27 | 1.5 |
| L mH | 0.43 | 0.45 | 0.45 | 0.29 | 0.29 | 0.17 | 0.34 | 0.33 | 0.8 | 0.43 |
| Poles pairs | 11 | 11 | 11 | 7 | 7 | 14 | 14 | 14 | 14 | 14 |
| Motor power W | 9 | 38 | 41 | 79 | 82 | 20 | 20 | 12 | 89 | 45 |
| Size dia mm | 43 | 45 | 45 | 46 | 46 | 53 | 53 | 55 | 57 | 57 |
| Size L mm | 30 | 36.1 | 44.1 | 51.5 | 77.5 | 26 | 32 | 47 | 56 | 58 |
| Max motor temp. 0C | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 | -20-+80 |
| Gear backlash arcmin | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 |
| Encoder bit | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
| Weight g | 97 | 132 | 178 | 259.6 | 507 | 150 | 227 | 310 | 385 | 372 |
| GIM Series Motor with GearBox 60, 81 &100 | |||||||||||||||||||||
| GIM | 6010-6 |
6010-8-Lite |
6010-36 | 8108-6 | 8108-8-Lite | 8108-9 | 8108-36 | 8115-6 | 8115-9 | 8115-36 | 10015-9 | ||||||||||
| Motor | Nominal Voltage V |
24 | 24 | 24 | 24 | 24 | 24 | 48 | 48 | 24 | 48 | 24 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 24 | 48 |
| Voltage Range V | 12-36 | 24-48 | 24-56 | 24-48 | 36-48 | 10-40 | 24-48 | ||||||||||||||
| Nominal Current A | 24 | 4 | 10.5 | 8 | 4 | 5 | 14.5 | 7 | 5 | 15 | 5 | 16 | 16 | 5 | 9.5 | 5 | 9.5 | 5 | 17.5 | 12 | |
| Max Current A | 40 | 15 | 25 | 20 | 15 | 20 | 45 | 25 | 20 | 45 | 20 | 45 | 45 | 20 | 45 | 20 | 25 | 20 | 35 | 35 | |
| Nominal Torque Nm | 3 | 3 | 5 | 24 | 18 | 6 | 6.5 | 7.5 | 9 | 9 | 36 | 33 | 11 | 9 | 17 | 13 | 45 | 54 | 25 | 28 | |
| Max Torque Nm | 9 | 9 | 11 | 58 | 45 | 15 | 17 | 22 | 22 | 22 | 90 | 93 | 29.5 | 25 | 45 | 35 | 115 | 150 | 60 | 70 | |
| Torque const. Nm/A | 0.1 | 0.07 | 0.47 | 3.05 | 0.07 | 0.09 | 0.45 | 1.0 | 0.09 | 0.6 | 0.09 | 2.05 | 0.7 | 0.28 | 1.55 | 0.28 | 4.8 | .28 | 1.37 | 2.41 | |
| Rated Gear shaft speed rpm | 320 | 300 | 120 | 30 | 50 | 200 | 250 | 110 | 130 | 180 | 35 | 40 | 140 | 180 | 110 | 120 | 15 | 30 | 50 | 45 | |
| Max Gear shaft speed rpm | 670 | 400 | 420 | 69 | 90 | 350 | 650 | 320 | 230 | 400 | 65 | 110 | 330 | 380 | 220 | 250 | 36 | 65 | 155 | 122 | |
| Speed const. KV | 19 | 130 | 12 | 1.9 | 130 | 100 | 14 | 5.7 | 100 | 9.4 | 100 | 2.5 | 7.1 | 50 | 4.8 | 50 | 4.8 | 50 | 4.5 | 2.5 | |
| Res ohm | 0.32 | 0.28 | 0.21 | 0.32 | 0.2 | 0.28 | 0.13 | 0.44 | 0.28 | 0.16 | 0.28 | 0.12 | 0.23 | 0.43 | 0.23 | 0.43 | 0.54 | 0.43 | 0.14 | 0.43 | |
| L mH | 0.2 | 0.2 | 0.12 | 0.23 | 0.19 | 0.17 | 0.06 | 0.04 | 0.17 | 0.05 | 0.17 | 0.05 | 0.09 | 0.27 | 0.26 | 0.27 | 0.26 | 0.27 | 0.09 | 0.27 | |
| Poles pairs | 14 | 14 | 14 | 14 | 14 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | 21 | |
| Motor power W | 85 | 90 | 65 | 75 | 90 | 125 | 170 | 80 | 125 | 170 | 125 | 135 | 160 | 160 | 195 | 160 | 85 | 160 | 130 | 130 | |
| Size dia mm | 76 | 76 | 80 | 76 | 76 | 96 | 96 | 92 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 122 | 122 | |
| Size L mm | 35 | 35 | 40 | 56.5 | 56.5 | 41.5 | 41.5 | 55 | 41.5 | 41.5 | 57 | 57 | 48.5 | 48.5 | 48.5 | 48.5 | 64 | 64 | 57.5 | 57.5 | |
| Max motor temp. 0C | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | |
| Gear box |
Type | Planetary | |||||||||||||||||||
| Gear rate | 6:1 | 6:1 | 8:1 | 36:1 | 36:1 | 6:1 | 6:1 | 8:1 | 9:1 | 9:1 | 36:1 | 36:1 | 6:1 | 6:1 | 9:1 | 9:1 | 36:1 | 36:1 | 9:1 | 9:1 | |
| Stall torque Nm | 40 | 15 | 25 | 20 | 15 | 20 | 45 | 25 | 20 | 45 | 20 | 45 | 45 | 20 | 45 | 20 | 25 | 20 | 35 | 35 | |
| Gear backlash arcmin |
15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | |
| Gear material | Steel | ||||||||||||||||||||
| Driver | Encoder | ||||||||||||||||||||
| Position control mode |
2KHZ | ||||||||||||||||||||
| Protection | Stall OTP | ||||||||||||||||||||
| Communication |
UART / CAN |
||||||||||||||||||||
| FW | MIT / ZE / CB | OD ZE |
MIT / ZE / CB | OD ZE |
MIT / ZE / CB | ||||||||||||||||
|
Motor & Gear |
Ambient temp. 0C | 0-40 | |||||||||||||||||||
| Max. Axial load N | 600 | 600 | 600 | 900 | 900 | 800 | 800 | 800 | 800 | 800 | 900 | 900 | 800 | 800 | 800 | 800 | 900 | 900 | 5k | 5k | |
| Max. Radial load N | 800 | 800 | 800 | 1k | 1k | 900 | 900 | 900 | 900 | 900 | 1k | 1k | 900 | 900 | 900 | 900 | 1k | 1k | 5k | 5k | |
| Size dia mm | 76 | 76 | 80 | 76 | 76 | 96 | 96 | 92 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 96 | 122 | 122 | |
| Size L mm | 35 | 35 | 40 | 56.5 | 56.5 | 41.5 | 41.5 | 55 | 41.5 | 41.5 | 57 | 57 | 48.5 | 48.5 | 48.5 | 48.5 | 64 | 64 | 57.5 | 57.5 | |
| Weight g | 318 | 318 | 388 | 574 | 574 | 567 | 567 | 396 | 567 | 567 | 760 | 760 | 705 | 705 | 705 | 705 | 960 | 960 | 1372 | 1372 | |
Driver Specifications:
| Item | Data and Specification |
| Rated Voltage | 0-26V, support 6S Lipo battery |
| Rated Current | 3A |
| Max Voltage | 30V |
| Peak Current | 6A |
| Encoder | 14 bit |
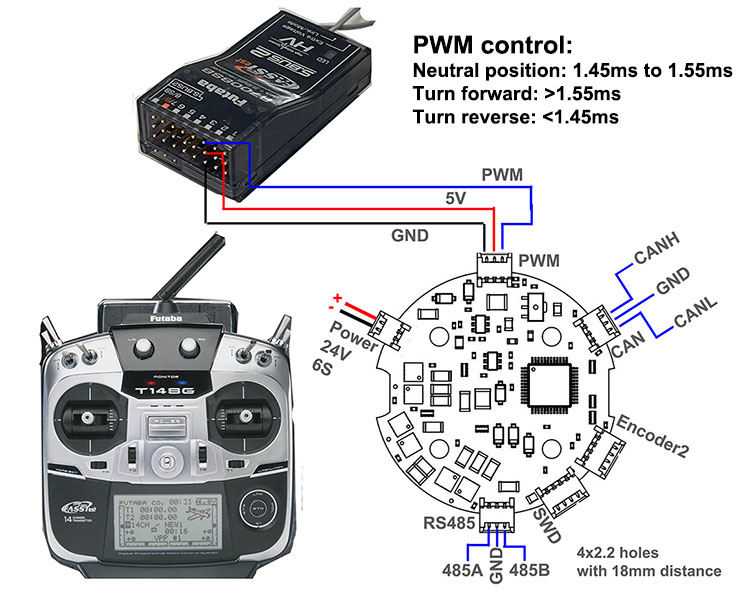
| PWM |
Control the motor rotation according to the configuration mode |
| RS485 | Driver parameter adjustment interface, firmware upgrade interface. RS485 baud rate is 19200, 8-bit data, no check, 1stop bit All RS485 commands end with 0x0D 0A (with Enter key value) All data written through the RS485 interface are stored in the chip at once. |
| CAN | Bus control interface, compatible with MIT control protocol |
| ENCODER2 | The second encoder interface is used to set up the absolute position |
1 RS485 Communication Menu and Control
m - MotorRun
b - MotorRunBackward
r - RestMode
p - ProgramRunMode
p - Position Mode
s - Speed Mode
c - Current Mode
t - Custom Mode
e - Exit to Menu
c - CalibrateEncoder
s - Setup
Configuration Options
prefix parameter min max current value
b Current Bandwidth (Hz) 100 2000 1000.0
P (P of Position) 1 100 50.0 (For PWM control only)
d (D of Position) 0 100 50.0 (For PWM control only)
x MAX(Position) 1 5 2.0
i CAN ID 0 127 1
m CAN Master ID 0 127 100
l Current Limit (A) 0.0 6.0 4.0
t CAN Timeout (cycles)(0 = none) 0 100000 0
To change a value, type 'prefix''value''ENTER'
i.e. 'b1000''ENTER'
z - SetZeroPosition
f - UpdateFirmware
e - ExitToMenu

For example: Send 's' + 'enter' (0x0D 0A) to goto Setting menu. Every command ends with 'enter' (0x0D 0A).

2 The driver connection PINS specifications.
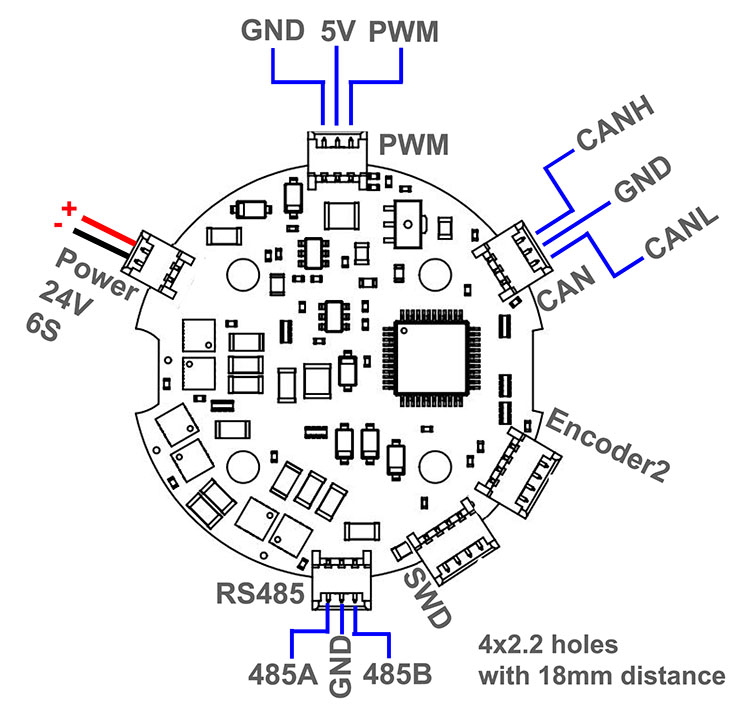
3 PWM Control
4 CAN control:
CANBUS protocol and commands, these commands are compatible with MIT Cheetah CAN
CAN data frame length 8 byte.
CAN Baudrate: 1Mbps
Default CAN ID: 1 (you can set the motor driver ID by RS485)
1) Control the motor
0xff 0xff 0xff 0xff 0xff 0xff 0xff 0xfc // Start the motor
0xff 0xff 0xff 0xff 0xff 0xff 0xff 0xfd // Stop the motor
2) Set the motor position zero point
0xff 0xff 0xff 0xff 0xff 0xff 0xff 0xfe
3)Switch the motor operation mode
0xff 0xff 0xff 0xff 0xff 0xff 0xff 0xf9 //Switch to torque mode
0xff 0xff 0xff 0xff 0xff 0xff 0xff 0xfA //switch to speed mode
0xff 0xff 0xff 0xff 0xff 0xff 0xff 0xfB //Switches to position mode
4) Running data samples of Continuous data in position mode:
Send 00000001 8 00 00 80 F8 88 86 63 E8
Receive 00000064 6 01 FF FF 80 07 AB
Send 00000001 8 00 00 80 F8 88 86 63 E8
Receive 00000064 6 01 D4 7E 49 67 3C
Send 00000001 8 00 00 80 F8 88 86 63 E8
Receive 00000064 6 01 8F 12 38 77 AC
Send 00000001 8 00 00 80 F8 88 86 63 E8
Receive 00000064 6 01 3E BA 32 67 DA
Send 00000001 8 FF FF 7D 08 88 86 63 E8
Receive 00000064 6 01 00 1F 80 08 23
Send 00000001 8 FF FF 7D 08 88 86 63 E8
Receive 00000064 6 01 17 B5 AC 98 D8
Send 00000001 8 FF FF 7D 08 88 86 63 E8
Receive 00000064 6 01 44 40 C0 C9 38
Send 00000001 8 FF FF 7D 08 88 86 63 E8
Receive 00000064 6 01 7C 2D CB 57 F7
Send 00000001 8 FF FF 7D 08 88 86 63 E8
Receive 00000064 6 01 B8 E6 CF 28 31
Notes:
Tags: GIM4310 Robot dog motor with 10:1 gear box Stator 4310 3Nm 110KV with MIT CAN Driver
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power