Your shopping cart is empty!
 English
EnglishDriver V3 for MIT60 series motors with CAN & RS485 simultaneously

Product Code: 2580063
Availability: 49996
Availability: 49996
Price: $69.88
Ex Tax: $69.88
Ex Tax: $69.88
3 or more $68.88
9 or more $66.88
9 or more $66.88
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
2580063 Driver V3 for MIT60 series motors with CAN & RS485 simultaneously
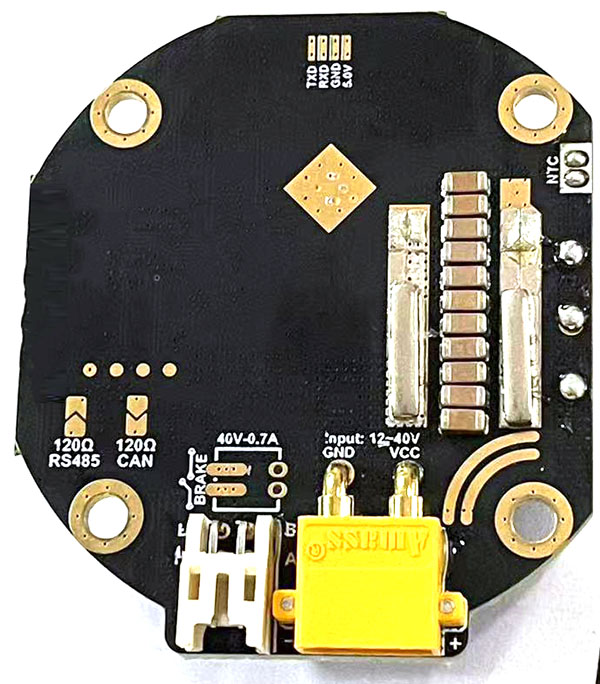
Driver: V3
- Supports CAN & RS485 protocol Simultaneously.
- Has PC GUI program.
- Has Individual mode ID: 0x01 to 0xFE. Send the command to individual driver, such as 0x01, only the 0x01 driver carries out the command and replies to the command.
- Has Broadcast mode ID: 0x00 to send the command to all drivers. All drivers will carry out the commad, but do not reply to the command.
- Has Public mode ID: 0xFF to send the command to all drivers. All drivers will carry out the command, and reply to the command. The Public mode is for CAN only. Please don't use Public mode on RS485 since it will burn the driver circuit.
The following is a sample on RS485 command control.
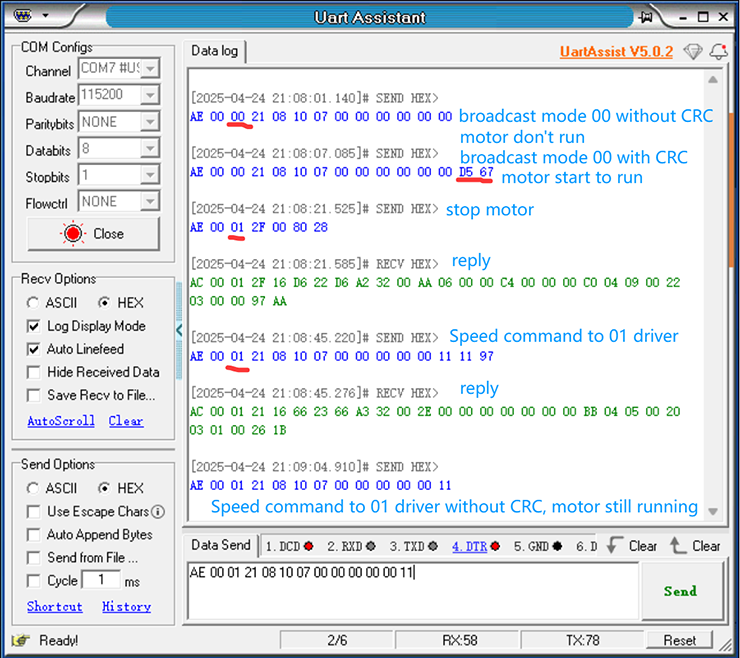
RS485 Protocol
| Field Name | Byte | Description |
| Header | 1 byte | Master header is 0xAE,Slave header is 0xAC; |
| Package Serial number | 1 byte | The master package serial number and slaver package serial number are same |
| Driver ID | 1 byte |
Driver ID is 0X01-0xFE; |
| Command | 1 byte | Function command |
| Data length | 1 byte | Data length, it can be 0 |
| Data | 0- | The data following the command |
| CRC | 2 byte | CRC16-Modbus |
Sample: AE 00 01 21 08 D0 07 00 00 00 00 00 00 DD CB // Run the 0x01 motor at speed 20RPM
CAN Protocol
| CAN | Description |
| StdID | CAN ID | 0x100 |
| DLC | Data length |
| Data[0] | Command code |
| Data[1] - Data[7] | Data |
Sample: CAN ID: 0x101, DLC: 5, Data: C1 D0 07 00 00 // Run the 0x01 motor at speed 20RPM
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power