Your shopping cart is empty!
 English
EnglishDriver with Open CAN protocol for high speed DM40 & DM50 Gimbal Motor FOC control

Product Code: 25540503
Availability: 49978
Availability: 49978
Price: $42.80
Ex Tax: $42.80
Ex Tax: $42.80
3 or more $42.50
6 or more $41.80
6 or more $41.80
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
25540503 Driver with Open CAN protocol for high speed DM40 & DM50 Gimbal Motor FOC control
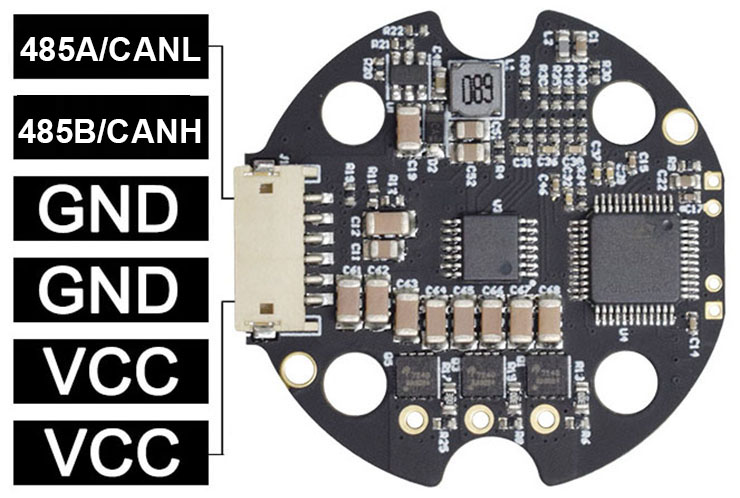
This 12bit encoder and driver is designed for DM40 & DM50 gimbal motor, the commucation CAN protocol is open code. There is no hole on the encoder magnet. So it cannot support slip ring. The engineer can design and make his own controller for his project.
When you order, please advise us the full motor name, such as DM4010, DM5015 and the KV or wire turns, so that we can match the exact firmware for your motor.
The following is the specifications:
Power: 7.4V - 24V (2S - 6S)
Driving current: 6A
Max Driving current: 8A ( 5S )
Torque closed loop control: Support
Speed closed loop control: Support
Position closed loop control: Support
PWM frequency: 24KHz
Torque closed loop frequency: 24KHz
Torque control bandwidth: 0.4KHz to 2.8KHz
Speed closed loop frequency: 8KHz
Position close loop frequency: 8KHz
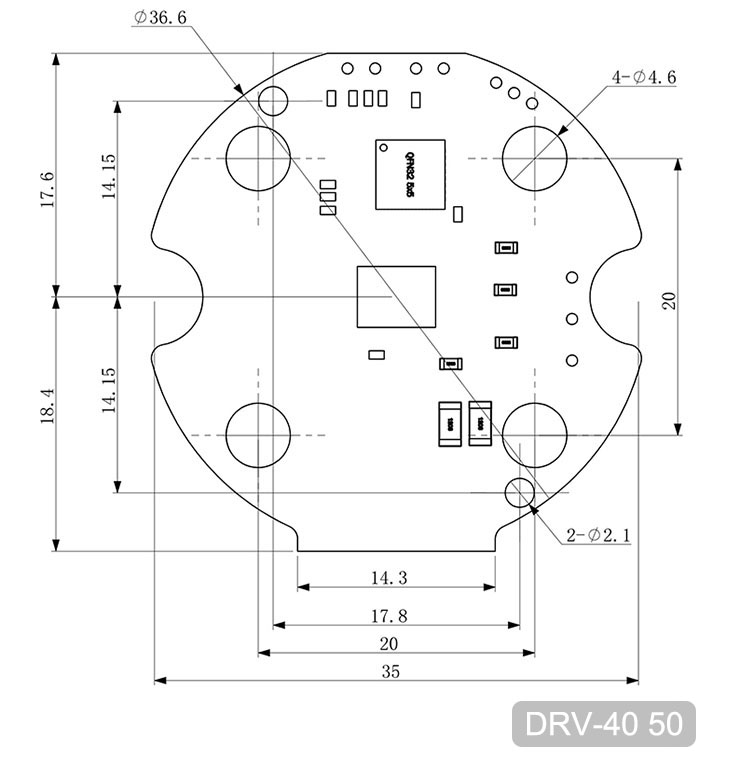
Size
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power