Your shopping cart is empty!
 English
EnglishDriver for GIM43 series motors with CAN and RS485, with MIT and CyberBeast Communication

Product Code: 25800431
Availability: 49987
Availability: 49987
Price: $74.50
Ex Tax: $74.50
Ex Tax: $74.50
3 or more $73.68
8 or more $72.80
8 or more $72.80
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
25800431 Driver for GIM43 series motors with CAN and RS485, with MIT and CyberBeast Communication
for GIM4305 and GIM4310.
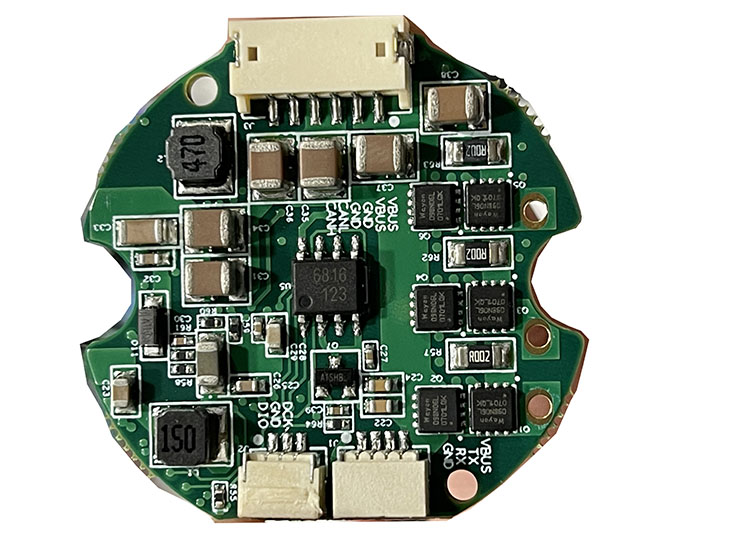
Picture
Specifications:
| Item | Data and Specification |
| Rated Voltage | 0-36V, support 8S Lipo battery |
| Rated Current | 3A |
| Max Voltage | 36V |
| Peak Current | 6A |
| Encoder | 14 bit |
| CyberBeast protocol |
|
| MIT protocol | compatible with MIT control protocol |
| CAN & RS485 | |
| ENCODER2 | The second encoder interface is used to set up the absolute position |
Driver: New driver
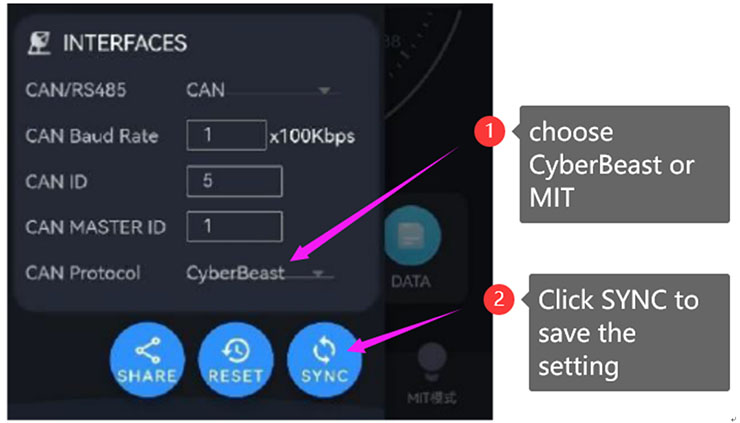
- Supports MIT CAN and CyberBeast CAN protocol. You can choose MIT CAN or Cyberbeast CAN protocol for communication.
- CyberBeast protocol supports CAN or RS485 protocol communications.
- Supports voltage, temperature reading. (0xB4 00 00 00 00 00 00 00 Read the voltage)
- Supports Ia, Ib, Ic,current reading. (0xB4 04 00 00 00 00 00 00 Read the Ia)
- Supports Torque control. (0x93 CC CC 7C 41 B8 0B 00 15.8Nm for 3s)
- Supports Speed control. (0x94 00 00 4A 42 B8 0B 00 50.5RPM for 3s)
- Supports Positoin control. (0x95 00 10 49 40 B8 0B 00 180degree for 3s)
- Supports motor Over Temperature protection. When the motor is over temperature, the motor will be shutdown.
- There are Windows PC App and Android App for mobile phone to set and test the motor. You can use USB to TLL for wire connectoin, or MotorWifi for wireless connection.

Connector:
XT30 for power
6pin for VCC VCC GND GND CANL CANH
4pin for GND RX TX 5V
Notes:
CAN Send: Identifier: 0x00 Standard Frame Frame Format: DATA DLC: 8 bytes
| DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | DATA[6] | DATA[7] | |||
| Data bit | 7-0 | 7-0 | 7-0 | 7-0 | 7-4 | 3-0 | 7-0 | 7-4 | 3-0 | 7-0 |
| Content | high 8 bits | low 8 bits | high 8 bits | low 4 bits | high 4 bits | low 8 bits | high 8 bits | low 4 bits | high 4 bits | low 4 bits |
| Motor position | Motor speed | KP | KD | torque | ||||||
| Value | rad | rad/s | Nm | |||||||
Motor CAN feedback
CAN Receive: Identifier: 0x00 + Driver ID Standard Frame Frame Format: DATA DLC: 8 bytes
| DATA[0] | DATA[1] | DATA[2] | DATA[3] | DATA[4] | DATA[5] | ||
| Data bit | 7-0 | 7-0 | 7-0 | 7-0 | 7-4 | 3-0 | 7-0 |
| Content | 8 bits | high 8 bits | low 8 bits | High 8 bits | low 4 bits | high 4 bits | low 8 bits |
| Driver ID | Motor position | Motor speed | Motor torque | ||||
| Value | rad | rad/s | Nm | ||||
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power