Your shopping cart is empty!
 English
English42AIM15 14poles Servo motor with 15bit FOC driver position closed loop, speed closed loop, modbus RTU RS485

Price: $68.60
Ex Tax: $68.60
Ex Tax: $68.60
3 or more $67.20
6 or more $65.90
6 or more $65.90
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
25304215 42AIM15 Servo Motor 14 poles with 15 bit FOC Driver, position closed loop, speed closed loop, modus RTU RS485, All In Motor
AIM series servo motor is All In Motor, including the motor, encoder and driver. The driver is with open RS485 protocol and you can control the motor with PU (pusle) and DIR (direction).


AIM motors Specifications:
| AIM Series | ||||||||||||||||
| 42AIM10 | 42AIM15 |
42AIM |
42AIM30 |
42AIM |
57AIM15 |
57AIM |
57AIM30 |
57AIM |
60AIM25 | 60AIM40 | ||||||
| Nominal voltage | V | 24 | 24-36 | 24-36 | 24-36 | 24-36 | 24-36 | 24-36 | 24-36 | 24-36 | 24-36 | 24-36 | ||||
| Nominal current | A | 1.6 | 2.2 | 2.2 | 4.4 | 4.4 | 2.2 | 2.2 | 4.4 | 4.4 | 7 | |||||
| Nominal torque | Nm | 0.33 | 0.48 | 0.24 | 0.96 | 0.48 | 0.48 | 0.24 | 0.96 | 0.48 | 2 | |||||
| Nominal Speed | rpm | 1000 | 1000 | 2500 | 1000 | 2500 | 1000 | 2500 | 1000 | 2500 | 1000 | 1000 | ||||
| Max Speed | rpm | 1500 | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | 1500 | ||||
| Power | W | 35 | 50 | 50 | 100 | 100 | 50 | 50 | 100 | 100 | 100 | 200 | ||||
| Phase to phase resistance | Ω | 2.65 | 1.3 | 2.65 | 1.3 | |||||||||||
| Phase to phase inductance | mH | 1.1 | 0.5 | 1.1 | 0.5 | |||||||||||
| Weight | g | 320 | 340 | 340 | 500 | 500 | 360 | 360 | 560 | 560 | 650 | 800 | ||||
| Feedback | Absolute encoder, 32768 pulses per turn, 15 bits per turn | |||||||||||||||
| Cooling mode | Natural cooling | |||||||||||||||
| Max input pulse frequency | 500KHz | |||||||||||||||
| Pulse command mode | Pulse + DIR | |||||||||||||||
| Electronic gear ratio | 1-65535 : 1-65535 | |||||||||||||||
| Position sampling frequency | 2KHz | |||||||||||||||
| Communication | RS485(modbusRTU 19200,8,N,1) / CANopen | |||||||||||||||
| Protection | Stall alarm | |||||||||||||||
| Max working temperature | C | 85 | ||||||||||||||
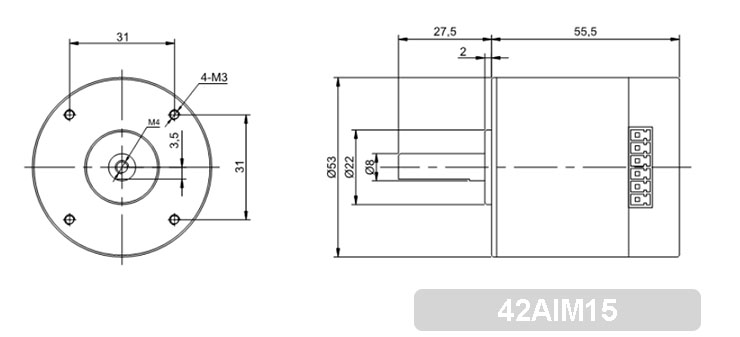
Drawings
AIM connector pins
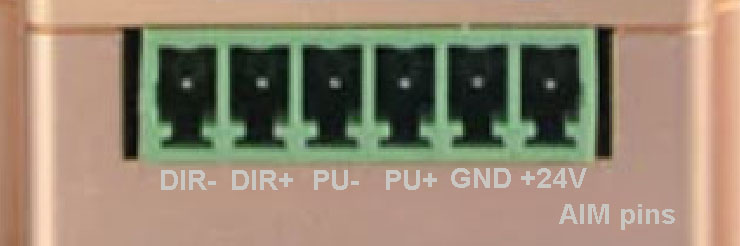
| +24V GND | DC Power supply. Please note that If the power positive and negative terminals are reversed, the device might be damaged. |
| PU+ PU- | Pulse signal. The PU+ is 3.3V to 5V, the PU- is 0 to 0.5V. The pulse width is big than 1.2us. |
| DIR+ DIR- | Direction signal. DIR+ is 4V to 5V, the DIR- is 0 to 0.5V. The DIR signal need to be established 5us earlier than the pulse signal to ensure the correct commutation. |
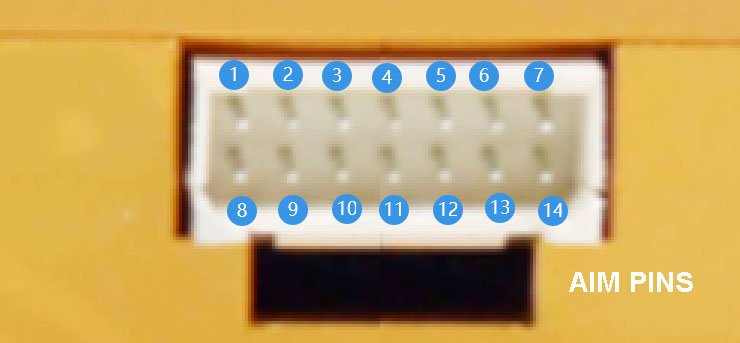
| 1 | NC | |
| 2 | DIR+ | Direction signal. DIR+ is 4V to 5V, |
| 3 | DIR- | Direction signal. the DIR- is 0 to 0.5V. |
| 4 | PU- | Pulse signal. The PU+ is 3.3V to 5V. The pulse width need to be big than 1.2us. |
| 5 | PU+ | Pulse signal. The PU- is 0 to 0.5V. The pulse width need to be big than 1.2us. |
| 6 | 485A | RS485(modbusRTU 19200,8,N,1) |
| 7 | 485B | RS485(modbusRTU 19200,8,N,1) |
| 8 | NC | |
| 9 | NC | |
| 10 | STOP+ | Motor stop input port + (when a 5V signal is input, the motor will immediately stop to the current position) |
| 11 | STOP- | Motor stop input port - |
| 12 | ZERO | Zero position output signal |
| 13 | COM | This COM is used by 12 Zero and 14 Error. |
| 14 | ERROR | Error alarm output signal |
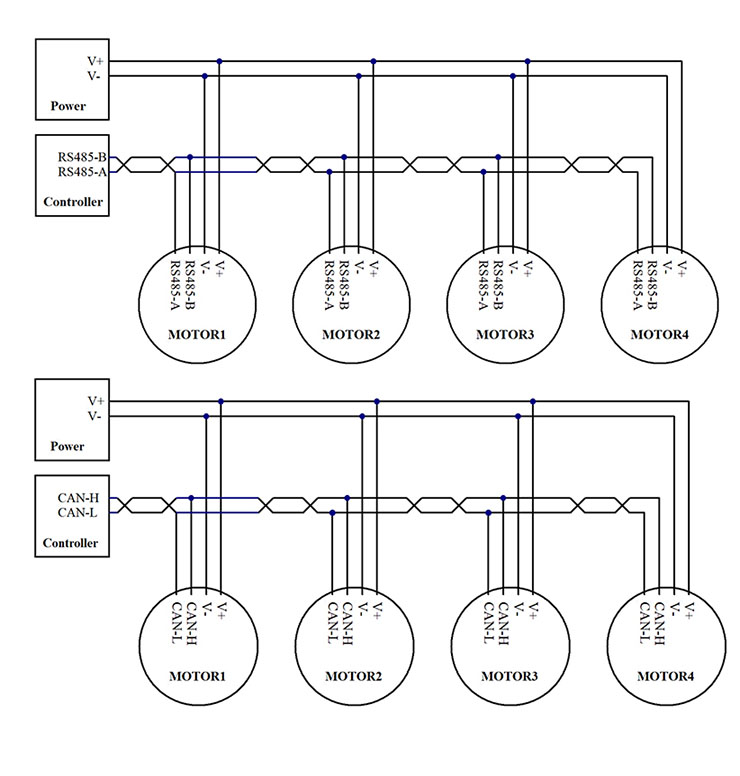
RS485 bus and CAN bus connection.
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power