Your shopping cart is empty!
 English
EnglishMG4005-10 Robot dog motor with gear box 1:10 & MIT Driver CAN Stator 4305 KV105

Price: $145.86
Ex Tax: $145.86
Ex Tax: $145.86
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
25340056 MG4005-10 Robot dog motor with gear box 1:10 & MIT Driver CAN Stator 4305 KV105
Please note that this version is with MIT CAN driver.
1. The MG4005 Robot dog motor is designed for 4kgs level mechanical dog.
2. This is a small integrated planet gear reduction motor, which is suitable for desktop robots, mechanical dogs, and robotic arms.


Specifications:
| Motor | MG Series Motors | |||||||||||||
| Part No. | 4005 -10 | 4010 -10 | 4010 -36 | 5010 -10 |
6010-6 |
6012 -8 |
6012 -36 | 8008 -9 | 8010 -6 | 8010 -36 | 8016 -6 | 10015 -10 | ||
| Turns | 25 | 14 | 14 | 13 | 20 | 20 | 20 | 17 | 17 | 13 | 13 | 11 | ||
| Nominal voltage | V | 24 | 24 | 24 | 24 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | 48 | |
| Nominal current | A | 1.6 | 3.5 | 3.5 | 4.4 | 3.8 | 3.8 | 3.8 | 4.9 | 4.9 | 6.9 | 6.5 | 8 | |
| Nominal power | 38.4 | 84 | 84 | 106 | 182.4 | 182.4 | 182.4 | 240 | 240 | 330 | 330 | 385 | ||
| Nominal torque | N.M | 1 | 2.5 | 9 | 4 | 5 | 5 | 15 | 10 | 9 | 35 | 13 | 30 | |
| Nominal Speed | rpm | 253 | 260 | 72 | 235 | 285 | 285 | 62 | 178 | 155 | 68 | 155 | 150 | |
| Max Speed | rpm | 316 | 320 | 90 | 320 | 350 | 350 | 78 | 220 | 225 | 80 | 225 | 190 | |
| Stall torque | N.M | 2.5 | 4.5 | 18 | 7 | 11.5 | 11.5 | 33 | 20 | 21 | 45 | 35 | 50 | |
| Stall current | A | 4 | 6.97 | 6.97 | 6.7 | 8 | 8 | 8 | 10 | 7 | 9 | 12.5 | 13 | |
| Resistance | Ω | 1.4 | 0.6 | 0.6 | 0.47 | 0.98 | 0.98 | 0.98 | 0.74 | 0.94 | 0.27 | 0.55 | 0.38 | |
| Wire connect | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | ||
| Phase to phase inductance | mH | 0.5 | 0.28 | 0.28 | 0.26 | 0.55 | 0.55 | 0.55 | 0.59 | 0.73 | 0.23 | 0.54 | 0.45 | |
| Speed constant | rpm/v | 105 | 108 | 3 | 98 | 58 | 58 | 58 | 42 | 32 | 51 | 30 | 28 | |
| Torque constant | N.M/A | 0.06 | 0.07 | 2.58 | 0.1 | 1.32 | 1.32 |
3.94 |
2.07 | 3.00 | 5.07 | 3.30 | 3.85 | |
| Radial load | N | 1000 | 1000 | 1000 | 1000 | 1000 | 1000 | 1000 | 1200 | 1200 | 1200 | 1200 | 2000 | |
| Axial load | N | 250 | 250 | 250 | 250 | 250 | 250 | 250 | 300 | 300 | 300 | 300 | 500 | |
| Rotor inertia | gc㎡ | 140 | 202 | 850 | 850 | 850 | 1550 | 805 | 2670 | 3400 | 5675 | |||
| Number of poles | pairs | 13 | 13 | 13 | 14 | 14 | 14 | 14 | 20 | 20 | 20 | 20 | 21 | |
| Motor weight | g | 154 | 250 | 350 | 420 | 480 | 480 | 570 | 630 | 860 | 710 | 1190 | ||
| Working temperature | C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | -20 - 80C | |
| Max demagnetize temperature | C | 120C | 120C | 120C | 120C | 120C | 120C | 120C | 120C | 120C | 120C | 120C | 120C | |
| Gear | Gear ratio | 10:1 | 10:1 | 36:1 | 10:1 | 6:1 | 8:1 | 36:1 | 9:1 | 6:1 | 36:1 | 6:1 | 10:1 | |
| Backlash | 10 | 8 | 6 | 8 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | ||
| Driver | Driver No. | DG40 | DG40 | DG40 | DG40 | DRC15 | DRC15 | DRC15 | DRC20 | DRC20 | DRC20 | DRC20 | DRC20 | |
| Input voltage | V | 7.4-32 | 7.4-32 | 7.4-32 | 7.4-32 | 12-48 | 12-48 | 12-48 | 12-48 | 12-50 | 12-50 | 12-50 | 12-50 | |
| Nominal Current | A | 8 | 8 | 8 | 8 | 10 | 10 | 10 | 15 | 15 | 15 | 15 | 15 | |
| Burst Current | A | 15 | 15 | 15 | 15 | 20 | 20 | 20 | 30 | 30 | 30 | 30 | 30 | |
| Nominal power | W | 120 | 120 | 120 | 120 | 300 | 300 | 300 | 700 | 700 | 700 | 700 | 700 | |
| Communication | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | CAN/ RS485 | ||
| Encoder | 14-bit | 18-bit | 18-bit | 18-bit | 16-bit | 16-bit | 16-bit | 18-bit | 18-bit | 18-bit | 18-bit | 18-bit | ||
| 2 Encoders | No | OPT | OPT | OPT | OPT | OPT | No | OPT | No | No | OPT | OPT | ||
| Baut rate | 1M | 1M | 1M | 1M | 1M | 1M | 1M | 1M | 1M | 1M | 1M | 1M | ||
| Communication frequency | 2K | 2K | 2K | 2K | 2K | 2K | 2K | 2K | 2K | 2K | 2K | 2K | ||
| Control frequency | ||||||||||||||
| Torque loop | kHz | 24 | 24 | 24 | 24 | 24 | 24 | 24 | 32 | 32 | 32 | 32 | 24 | |
| Speed loop | kHz | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | |
| Position loop | kHz | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Control mode | ||||||||||||||
| Torque loop | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | ||
| Speed loop | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | ||
| Position loop | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | ||
| S-Curve | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | ||
| ID Switch | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | ||
| Connector | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | XT2.0 | ||
| Temperature sensor | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | ||
You are welcome to customize the motor, such as: color, reduction ratio, installation hole position, and other specifications!
MIT Driver Specificatons
| Nominal voltage | V | 24 |
| Nominal current | A | 2 |
| Max voltage | V | 28 |
| Max current | A | 3 |
| Encoder | 14 bit | |
| Chip | GD32 | |
| Connectors | PWM | Run the motor according to the setting mode, (position, speed, torque) |
| Encoder 2 | The second encoder will be support in the near future | |
| RS485 | Set driver parameter interface | |
| CAN | Compatible with MIT Control Protocol | |
| Debug | For debug only |
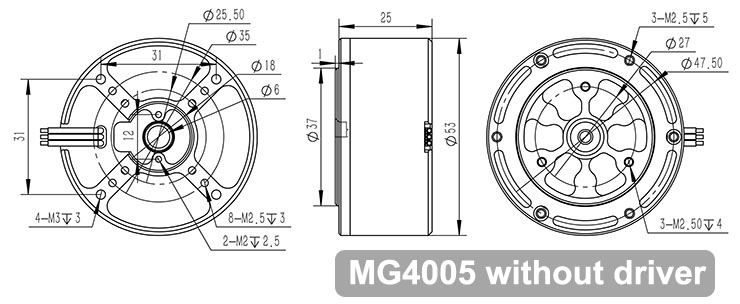
Drawings
Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power