Your shopping cart is empty!
 English
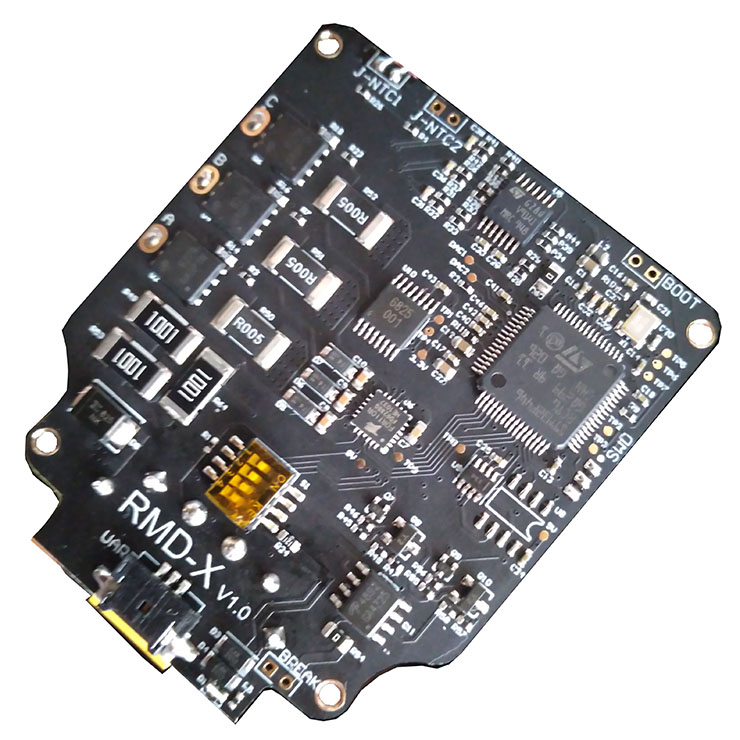
EnglishRMD-X8 and X8 Pro Driver with open protocol CAN (Driver only)
")
Product Code: 2519818621
Availability: Out Of Stock
Availability: Out Of Stock
Price: $99.80
Ex Tax: $99.80
Ex Tax: $99.80
3 or more $98.80
9 or more $97.86
9 or more $97.86
Qty:
- OR -
Add to Wish List
Add to Compare
Add to Compare
2519818621 Driver with open protocol CAN for RMD-X8 and X8 Pro
The contol command samples.
The following is a sample to send a running command to the #1 motor.
|
ID |
Len |
Data0 |
D1 |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
Format |
Type |
|
141 |
8 |
88 |
|
|
|
|
|
|
|
Standard |
Data |
The following is a sample to send a stop command to the #1 motor.
|
ID |
Len |
Data0 |
D1 |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
Format |
Type |
|
141 |
8 |
81 |
|
|
|
|
|
|
|
Standard |
Data |
The following is a sample to send a Speed closed loop control command to the #1 motor running at 90dps.
|
ID |
Len |
Data0 |
D1 |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
Format |
Type |
|
141 |
8 |
A2 |
|
|
|
28 |
23 |
|
|
Standard |
Data |
The following is a sample to send a Position + Speed closed loop control command to the #1 motor to run at speed 90dps to 720 degree
|
ID |
Len |
Data0 |
D1 |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
Format |
Type |
|
141 |
8 |
A4 |
|
28 |
23 |
40 |
19 |
01 |
|
Standard |
Data |
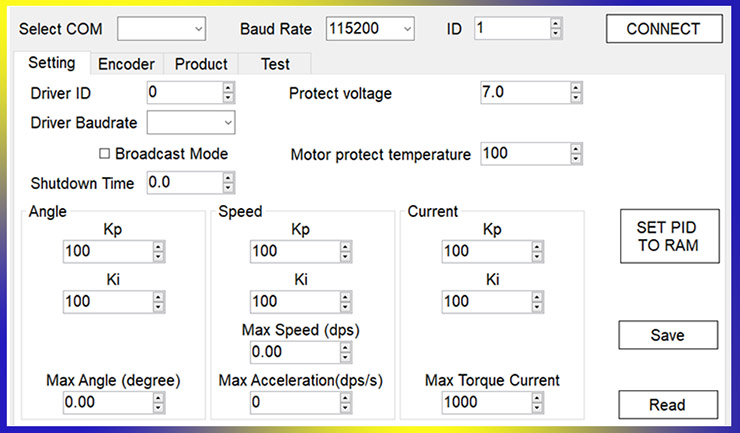
1.Single motor command list
The current CAN control commands supported by RMD motor drives are as follows:
|
|
Description |
Command |
|
1 |
Read PID parameter command |
0x30 |
|
2 |
Write PID to RAM parameter command |
0x31 |
|
3 |
Write PID to ROM parameter command |
0x32 |
|
4 |
Read encoder command |
0x90 |
|
5 |
Write encoder value to ROM as motor zero command |
0x91 |
|
6 |
Write current position to ROM as motor zero command |
0x19 |
|
7 |
Read multi-turn angle command |
0x92 |
|
8 |
Read single circle angle command |
0x94 |
|
9 |
Clear motor angle command (set initial position) |
0x95 |
|
10 |
Read motor status 1 and error flag commands |
0x9A |
|
11 |
Clear motor error flag command |
0x9B |
|
12 |
Read motor status 2 command |
0x9C |
|
13 |
Read motor status 3 command |
0x9D |
|
14 |
Motor off command |
0x80 |
|
15 |
Motor stop command |
0x81 |
|
16 |
Motor running command |
0x88 |
|
17 |
Torque closed loop control command |
0xA1 |
|
18 |
Speed closed loop control command |
0xA2 |
|
19 |
Position closed loop control command 1 |
0xA3 |
|
20 |
Position closed loop control command 2 |
0xA4 |
|
21 |
Position closed loop control command 3 |
0xA5 |
|
22 |
Position closed loop control command 4 |
0xA6 |
Pins Specifications

Copyright © 2003-2017 by SMC Powers Ltd. All Rights Reserved. Email: shop@smc-powers.com Skype:smc-power